 Внешние
Внешние
конструктивные формы асинхронных двигателей определяются способом
крепления двигателя и формой защиты его от воздействий окружающей среды.
Широко распространено нормальное исполнение двигателя на лапах. В этом случае вал двигателя должен быть расположен горизонтально.
Широко применяют фланцевые двигатели для горизонтальной и
вертикальной установок. Выпускают также встроенные асинхронные двигатели, не имеющие станины, подшипниковых щитов, вала …
Внешние конструктивные формы асинхронных двигателей определяются способом крепления двигателя и формой защиты его от воздействий окружающей среды. Широко распространено нормальное исполнение двигателя на лапах (рис. 1, а). В этом случае вал двигателя должен быть расположен горизонтально. Широко применяют фланцевые двигатели (рис. 1, б) для горизонтальной и вертикальной установок.
Выпускают также встроенные асинхронные двигатели, не имеющие станины, подшипниковых щитов, вала. Элементы такого двигателя встраивают в корпусные детали станка, причем валом двигателя служит один из валов станка (часто шпиндель), а станиной — корпус узла станка, например шлифовальной бабки (рис. 2).
За рубежом получили распространение двигатели специальной конструктивной формы, в том числе двигатели, имеющие малые радиальные размеры и значительную длину, и дискообразные двигатели, в частности, со статором в виде цилиндра и наружным ротором в форме кольца. Применяют также двигатели, при включении которых ротор, имеющий форму конуса, смещается в осевом направлении, развивая значительную силу тяги.
Эту силу используют для освобождения механического тормоза, воздействующего на вал двигателя после отключения двигателя от сети. Кроме того, применяют многочисленные конструкции двигателей с пристроенными редукторами, коробками скоростей и механическими вариаторами, обеспечивающими бесступенчатое регулирование.
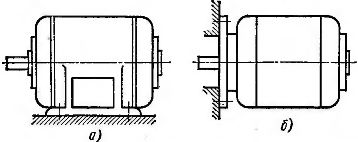
Рис. 1. Конструктивные формы асинхронных двигателей
Отрицательной стороной применения двигателей специальных конструктивных форм является трудность их замены в случае аварии. Вышедший из строя электродвигатель приходится не заменять, а ремонтировать, причем во время ремонта станок простаивает.
Для привода станков применяют двигатели с различными формами защиты от воздействий окружающей среды.
Защищенные электродвигатели имеют решетки, закрывающие вентиляционные отверстия подшипниковых щитов. Это предотвращает попадание внутрь двигателя посторонних предметов, а также исключает возможность прикосновения рабочего к вращающимся и токоведущим частям. Для защиты от капель жидкостей, падающих сверху, двигатели имеют вентиляционные отверстия, обращенные вниз или расположенные в вертикальных плоскостях.
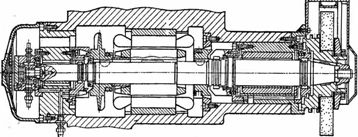
Рис. 2. Встроенный двигатель шлифовального шпинделя
Однако при работе такого электродвигателя в цехе его вентилятор вместе с воздухом засасывает внутрь пыль, брызги охлаждающей жидкости или масла, а также мелкие стальные или чугунные частицы, которые, прилегая к изоляции обмотки и вибрируя под действием переменного магнитного поля, быстро изнашивают изоляцию.
Более надежную защиту от воздействий окружающей среды имеют закрытые электродвигатели, подшипниковые щиты которых не имеют вентиляционных отверстий. Такие двигатели при одинаковых размерах с защищенными, вследствие худшего охлаждения, обладают меньшей мощностью. При одинаковых мощностях и частотах вращения закрытый электродвигатель в 1,5—2 раза тяжелее защищенного и стоимость его соответственно выше.
Стремление сократить габаритные размеры и стоимость закрытых двигателей привело к созданию закрытых обдуваемых электродвигателей. Такой электродвигатель имеет наружный вентилятор, укрепленный на конце вала двигателя, противоположном приводному, и закрытый колпаком. Этот вентилятор обдувает корпус электродвигателя.
Двигатели с обдувом по сравнению с закрытыми двигателями имеют значительно меньшую массу и более низкую стоимость. Обдуваемые двигатели чаще всех других применяют для привода металлорежущих станков. Двигатели, имеющие другие формы защиты от воздействий окружающей среды, употребляют для привода станков относительно редко. В частности, закрытые электродвигатели иногда применяют для привода шлифовальных станков.
Электродвигатели рассчитаны на стандартные напряжения 127, 220 и 380 В. Один и тот же двигатель можно включать в сети с разными напряжениями, например, в сети с напряжениями 127 и 220 В, 220 и 380 В. При этом для меньшего из двух напряжений обмотку статора электродвигателя соединяют в треугольник, для большего — в звезду. Ток в обмотках электродвигателя и напряжение на них будут при таком включении в обоих случаях одни и те же. Кроме того, выпускают электродвигатели на 500 В, их статоры постоянно соединены в звезду.
Асинхронные короткозамкнутые двигатели, применяемые во многих отраслях промышленности, выпускают с номинальными мощностями 0,6—100 кВт на синхронные частоты вращения 600, 750, 1000, 1500 и 3000 об/мин.
Сечение проводов обмотки электродвигателя зависит от величины силы тока, проходящего по ней. При большем токе обмотка двигателя будет иметь больший объем. Сечение магнитопровода пропорционально величине магнитного потока. Таким образом, размеры электродвигателя определяются расчетными значениями тока и магнитного потока или номинальным моментом электродвигателя. Номинальная мощность двигателя

где Pн — номинальная мощность, кВт, Мн— номинальный момент, Н • м, nн— номинальная частота вращения, об/мин.
Номинальная мощность при одних и тех же размерах двигателя возрастает с увеличением его номинальной частоты вращения. Поэтому тихоходные электродвигатели имеют большие размеры, чем быстроходные той же мощности.
При шлифовании отверстий малого диаметра для получения соответствующих скоростей резания нужны весьма высокие частоты вращения шлифовальных шпинделей. Так, при шлифовании кругом диаметром 3 мм со скоростью всего лишь 30 м/с частота вращения шпинделя должна быть равна 200000 об/мин. При высоких частотах вращения шпинделя силу прижатия крута можно уменьшить. При этом засаливание круга и изгиб оправки уменьшаются, а чистота поверхности и точность обработки повышаются.
В связи с изложенным, в промышленности применяют многочисленные модели так называемых электрошпинделей с частотами вращения 12 000—144 000 об/мин и выше. Электрошпиндель (рис. 3, а) представляет собой шлифовальный шпиндель на подшипниках качения со встроенным короткозамкнутым двигателем повышенной частоты. Ротор двигателя помещен между двумя опорами на конце шпинделя, противоположном шлифовальному кругу.
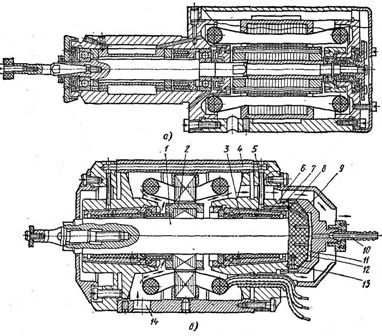
Рис. 3. Электрошпиндели
Статор двигателя электрошпинделя собирают из листовой электротехнической стали. На нем размещают двухполюсную обмотку. Ротор двигателя при частотах вращения до 30000—50000 об/мин набирают также из листовой стали и снабжают обычной короткозамкнутой обмоткой. Диаметр ротора стремятся по возможности уменьшить.
Особое значение для работы электрошпинделей имеет выбор типа подшипников. Обычно применяют шарикоподшипники повышенной точности, которые работают с предварительным натягом, создаваемым посредством тарированных пружин. Такие подшипники применяют для частот вращения, не превышающих 100000 об/мин.
Значительное применение в промышленности получили аэростатические подшипники (рис. 3, б). Вал 1 электродвигателя повышенной частоты вращается в подшипниках 3 с воздушной смазкой. Осевая нагрузка воспринимается воздушной подушной между торцом вала и подпятником 12, к которому вал прижимается под давлением воздуха, подаваемого внутрь корпуса через отверстие 14 для охлаждения двигателя. Сжатый воздух проходит через фильтр и попадает через штуцер 10 в камеру 11. Отсюда по каналу 9 и круговой канавке 8 воздух проходит в канал 7 и камеру 6. Из нее воздух поступает в зазор подшипника. К левому подшипнику воздух подводится через трубки 5 и каналы 4 в корпусе двигателя.
Отработанный воздух отводится по каналам 13. Воздушная подушка в зазоре подпятника создается воздухом, проходящим из камеры 11 через подпятник из пористого углеграфита. Каждый подшипник имеет коническую латунную обойму. В нее запрессован вкладыш из углеграфита, поры которого заполнены бронзой. Перед пуском электрошпинделя подают воздух, и между шпинделем и вкладышами образуются воздушные подушки. Это устраняет трение и износ подшипников при пуске. Затем двигатель включают, частота вращения ротора 2 достигает номинальной за 5—10 с. При отключении двигателя ротор 2 вращается по инерции в течение 3—4 мин. Для уменьшения этого времени применяют электрическое торможение.
Использование воздушных подушек резко уменьшает потери на трение в электрошпинделе, расход воздуха составляет 6—25 м3/ч.
Применяли также электрошпиндели на подшипниках с жидкостной смазкой. Для их работы требуется непрерывная циркуляция масла под высоким давлением, иначе нагрев подшипников становится недопустимым.
При производстве высокочастотных электродвигателей требуется точное изготовление отдельных деталей, динамическая балансировка ротора, точная сборка и обеспечение строгой равномерности зазора между статором и ротором. Частоту тока, питающего электродвигатель повышенной частоты, выбирают в зависимости от требуемой частоты вращения электродвигателя:

где nо— синхронная частота вращения электродвигателя, об/мин, f — частота тока, Гц, p — число пар полюсов, поскольку p = 1, то

При синхронных частотах вращения электрошпинделей 12000 и 120000 об/мин частота тока должна быть соответственно равна 200 и 2000 Гц.
Для питания двигателей повышенной частоты применяют специальные генераторы. На рис. 4 представлен синхронный индукционный генератор трехфазного тока. На статоре генератора имеются широкие и узкие пазы. Обмотка возбуждения, которая размещена в широких пазах статора, питается постоянным током. Магнитное поле проводников этой обмотки замыкается через зубцы статора и выступы ротора так, как это показано на рис. 4 штриховой линией.
При вращении ротора магнитное поле, перемещаясь вместе с выступами ротора, пересекает витки обмотки переменного тока, размещенной в узких пазах статора, и наводит в них переменную э. д. с. Частота этой э. д. с. зависит от частоты вращения и числа выступов ротора. Электродвижущие силы, наведенные тем же потоком в катушках обмотки возбуждения, взаимно компенсируются вследствие встречного включения катушек. Обмотки возбуждения питаются через выпрямитель, присоединенный к сети переменного тока. Статор и ротор имеют магнитопроводы из листовой электротехнической стали.
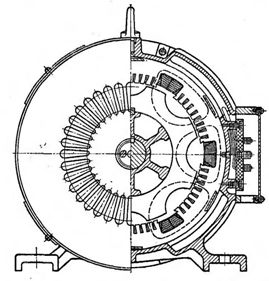
Рис. 4. Индукционный генератор повышенной частоты
Генераторы описанной конструкции изготовляют на номинальные мощности от 1 до 3 кВт и на частоты от 300 до 2400 Гц. Генераторы приводят во вращение от асинхронных двигателей с синхронной частотой вращения 3000 об/мин.
Индукционные генераторы повышенной частоты начинают заменять полупроводниковыми (тиристорными) преобразователями. При этом обычно обеспечивают возможность изменения частоты тока, а следовательно, возможность регулирования частоты вращения электродвигателя. Если при таком регулировании напряжение поддерживать неизменным, то осуществляется регулирование с постоянной мощностью. Если поддерживать отношение напряжения к частоте тока (а следовательно, магнитный поток двигателя) неизменным, то регулирование производится с постоянным на всех скоростях длительно допустимым моментом.
Преимуществами приводов с тиристорным преобразователем частоты и асинхронным короткозамкнутым двигателем являются высокий к. п. д. и упрощение эксплуатации. Недостатком является пока еще высокая стоимость. В станкостроении наиболее целесообразно использование такого привода для двигателей повышенной частоты. В нашей стране созданы опытные приводы такого рода.
В исполнительных приводах станков нередко используют двухфазные маломощные асинхронные двигатели. Статор такого двигателя имеет две обмотки: обмотку возбуждения 1 и обмотку управления 2 (рис. 5, а). Короткозамкнутый ротор 4 имеет большое активное сопротивление. Оси обмоток перпендикулярны друг другу.
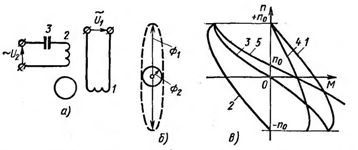
Рис. 5. Схема двухфазного асинхронного двигателя и его характеристики
К обмоткам приложены напряжения Ul и U2. При включении конденсатора 3 в цепь обмотки 2 ток в ней опережает по фазе ток в обмотке 1. При этом образуется вращающееся эллиптическое магнитное поле и короткозамкнутый ротор 4 начинает вращаться. Если уменьшить напряжение U2, то ток в обмотке 2 также будет уменьшаться. Это вызовет изменение формы эллипса вращающегося магнитного поля, которое делается все более вытянутым (рис. 5, б).
Двигатель с эллиптическим полем можно рассматривать как два двигателя на одном валу, один из которых работает с пульсирующим полем Ф1 а другой с круговым полем Ф2. Двигатель с пульсирующим полем Ф1 можно рассматривать как два одинаковых асинхронных двигателя с круговым полем, включенных для вращения в противоположные стороны.
На рис. 5, в показаны механические характеристики 1 и 2 асинхронного двигателя с круговым вращающимся полем и значительным активным сопротивлением ротора при его вращении в разные стороны. Механическую характеристику 3 однофазного двигателя можно построить путем вычитания моментов М характеристик 1 и 2 при каждом значении n. При любом значении n момент однофазного двигателя с большим сопротивлением ротора является тормозным. Механическую характеристику двигателя с круговым полем представляет кривая 4.
Механическую характеристику 5 двухфазного двигателя можно построить путем вычитания моментов М характеристик 3 и 4 при любом значении п. Значение n0 представляет собой частоту вращения двухфазного асинхронного двигателя при идеальном холостом ходе. Регулируя ток питания обмотки 2 (рис. 5, а), можно изменять наклон характеристики 4 (рис. 5, в), а следовательно, и значение n0. Таким образом производится регулирование частоты вращения двухфазного асинхронного двигателя.
При работе с большими значениями скольжения потери в роторе становятся весьма значительными. По этой причине рассмотренное регулирование применяют только для вспомогательных приводов малой мощности. Для уменьшения времени разгона и торможения применяют двухфазные асинхронные двигатели с полым ротором. У такого двигателя ротором является тонкостенный алюминиевый полый цилиндр.