 Управление
Управление
двигателем может быть осуществлено в зависимости от величины тока
статора. Схема пуска в функции тока асинхронного двигателя с фазным
ротором изображена на рисунке. В момент пуска ток достигает величины I1,
а через определенный интервал времени снижается до величины I2. В этот момент автоматически закорачивается часть пускового сопротивления в цепи ротора, ток повышается до величины
I1, затем снова падает до величины I2, что вызывает закорачивание следующей части пускового сопротивления …
Управление двигателем может быть осуществлено в зависимости от величины тока статора. Схема пуска в функции тока асинхронного двигателя с фазным ротором изображена на рис. 1 а.
В момент пуска ток достигает величины I1, а через определенный интервал времени снижается до величины I2 (рис.б). В этот момент автоматически закорачивается часть пускового сопротивления в цепи ротора, ток повышается до величины I1, затем снова падает до величины I2, что вызывает закорачивание следующей части пускового сопротивления. Повторяется данный процесс до тех пор, пока не будут закорочены все ступени пускового сопротивления. Для этих целей используют реле максимального тока, обмотки которых включают в силовую цепь двигателя.
При нажатии на пусковую кнопку SB1 (см. рис. а) срабатывает контактор КМ, главные контакты которого включают двигатель в сеть при полном пусковом сопротивлении в цепи ротора. При этом получает электропитание обмотка реле КА, размыкающие контакты которого находятся в цепи катушки контактора ускорения К1. Реле КА отрегулировано так, что время его срабатывания меньше, чем у контактора К1. Кроме того, его размыкающие контакты при максимально допустимом значении пускового тока размыкаются, а при уменьшении тока до величины его переключения вновь замыкаются, поэтому катушка К1 включается через контакты реле КА в момент закорачивания ступени пускового сопротивления.
Реле КА сработает раньше включения контактора ускорения К1, и разгон двигателя будет происходить при полностью введенном пусковом сопротивлении. При снижении пускового тока переключения контакты реле КА замкнутся и включится катушка К1. При этом замыкается контакт К1 обеспечивая самопитание катушки независимо от реле КА, и размыкается контакт в цепи управления, предотвращая преждевременное включение контактора ускорения К2.
Так как силовые контакты К1 закорачивают часть пускового сопротивления, то ток статора возрастает до наибольшего значения и реле КА, срабатывая, размыкает свои контакты в цепи питания катушки К2. Когда двигатель приобретает достаточную частоту вращения и ток статора вновь снизится до тока переключения, контакты реле КА замкнутся и включат катушку К2, закорачивающую своими контактами вторую ступень пускового сопротивления.
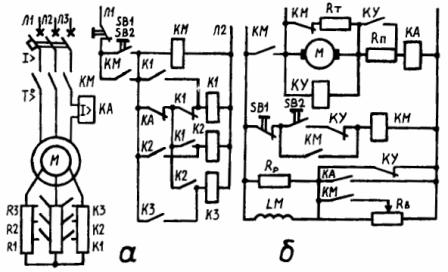
Рис. 1. Схемы управления в функции тока: а — асинхронным двигателем с фазным ротором; б —двигателем постоянного тока с параллельным возбуждением
Ток статора при этом вновь увеличивается, реле КА сработает и разомкнет свои контакты. Катушка К2 не потеряет питания, так как успеет замкнуться блок-контактами К2. Новое уменьшение тока статора после очередного разгона приведет к включению катушки К3 и закорачиванию последней ступени пускового сопротивления. Нажатием кнопки SB происходит останов двигателя, и схема готова к очередному пуску. При помощи реле тока, настроенных на возврат при токе 12, можно тормозить и реверсировать различные электроприводы. Недостатком схем управления в функции тока является довольно большое число контактов.
Для нереверсивного управления двигателем постоянного тока параллельного возбуждения мощностью несколько киловатт можно использовать одну ступень пускового реостата (см. рис. б). На схеме показаны: регулировочное сопротивление RB в цепи возбуждения; разрядное сопротивление Rp, включаемое параллельно обмотке возбуждения LM; тормозное сопротивление RТ, включаемое параллельно якорю М при его отключении от сети, и пусковое сопротивление RП включаемое последовательно в цепь якоря в период пуска. Для создания максимального потока при пуске обмотка возбуждения LM в исходном положении включена на полное напряжение.
При нажатии на кнопку SB2 якорь двигателя линейным контактором КМ включается в сеть последовательно с сопротивлением RП Реле управления пуском КА работает в функции тока якоря. При увеличении тока замыкающий контакт КА шунтирует сопротивление RB, увеличивая магнитный поток возбуждения, а при уменьшении тока контакт КА размыкается и обмотка LM включается последовательно с сопротивлением реостата RB, благодаря чему магнитный ток уменьшается.
При пуске двигателя повышенный пусковой ток якоря включает реле КА и обмотка LM создает максимальный поток. При достижении определенной частоты вращения включается контактор ускорения К, закорачивается пусковое сопротивление RП, после чего двигатель работает по своей естественной характеристике. Когда ток якоря снизится (в результате разгона двигателя), до включения реле КА разомкнётся контакт КА в цепи возбуждения.
Обмотка LM включится последовательно с сопротивлением RB, что вызовет ослабление потока возбуждения и соответствующее увеличение тока якоря. Реле КА снова сработает, увеличивая поток и одновременно повышая частоту вращения двигателя. За время пуска реле КА срабатывает несколько раз, пока двигатель не достигнет частоты вращения заданной регулировочным реостатом RB. Такое вибрационное устройство, работающее в функции тока, упрощает схему по сравнению со схемами управления в функции времени.
При включении двигателя нажатием кнопки SB1 якорь включается размыкающим контактом КМ на тормозное сопротивление RT и автоматически происходит динамическое торможение. В начале торможения магнитное поле несколько ослабляется из-за размыкания контакта КМ на ползунке регулировочного реостата, и ток возбуждения проходит через все сопротивление RB. При дальнейшем снижении частоты вращения двигателя выключается контактор ускорения К, и поток усиливается, так как обмотка возбуждения включается па полное напряжение сети через размыкающий контакт К, что приводит к усилению тормозного момента.