




Электрические регуляторы косвенного действия
 В электрических и электронных регуляторах для управления исполнительным механизмом используется электрическая энергия. Для создания позиционных систем автоматического регулирования в литейных и термических цехах используют серийные приборы различных модификаций, снабженных электрическими контактными устройствами. Для позиционного регулирования могут быть использованы преобразователи релейного типа. В схеме двухпозиционного регулирования температуры в сушильной печи …
В электрических и электронных регуляторах для управления исполнительным механизмом используется электрическая энергия. Для создания позиционных систем автоматического регулирования в литейных и термических цехах используют серийные приборы различных модификаций, снабженных электрическими контактными устройствами. Для позиционного регулирования могут быть использованы преобразователи релейного типа. В схеме двухпозиционного регулирования температуры в сушильной печи …
В электрических и электронных регуляторах для управления исполнительным механизмом используется электрическая энергия.
Для создания позиционных систем автоматического регулирования в литейных и термических цехах используют серийные приборы различных модификаций, снабженных электрическими контактными устройствами. Для позиционного регулирования могут быть использованы преобразователи релейного типа (биметаллические, дилатометрические и др.).
Схема двухпозиционного регулирования температуры
В схеме двухпозиционного регулирования температуры в сушильной печи (рис. 1) система обогрева сушильной печи устроена так, что если температура в рабочем пространстве станет ниже допустимой, то должны включаться нагревательные элементы ЕК1 большой мощности, а если температура станет выше допустимой, то включаются элементы ЕК2 малой мощности.
В качестве чувствительного элемента используется термометр сопротивления 1, подключенный к электронному мосту 2 по трехпроводной схеме. Если температура в печи отклонится от заданного значения, то изменится электрическое сопротивление термометра и в диагонали моста появится сигнал разбаланса.
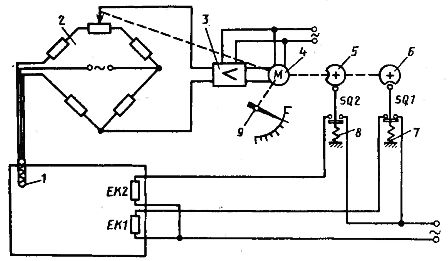
Рис. 1. Схема двухпозициоииого электрического регулятора температуры
Усиленный электронным усилителем 3 сигнал приводит во вращение ротор реверсивного двигателя 4. Направление его вращения зависит от знака разбаланса, т. е. от знака отклонения температуры от заданного значения. С ротором электродвигателя кинематически связаны два диска: 5 и б, положение которых зависит от угла поворота ротора, следовательно, от положения движка реохорда и показывающей стрелки 9 моста.
К дискам с помощью пружин 7 и 8 прижаты направляющие контактов SQ1 и SQ2. При вращении дисков контакт SQ2 замкнут в интервале показаний прибора от начала шкалы до впадины диска 5 и разомкнут в интервале от впадины до максимума шкалы. Контакт SQ1, наоборот, разомкнут от начала шкалы до впадины диска 6 и замкнут в интервале от впадины до максимума шкалы.
При достижении нижнего температурного предела замыкается контакт SQ1 и включаются нагревательные элементы ЕК1 большой мощности. При достижении верхнего температурного предела замыкается контакт SQ2, а контакт SQ1 размыкается, что приводит к медленному снижению температуры. Как только будет достигнут нижний предел температуры, ситуация повторится, и т. д.
На рис. 2 показана электрическая схема двухпозициоииого регулирования температуры в рабочем пространстве камерной печи типа СНЗ-4,0.8,0.2,6/10 с защитной атмосферой. Печь трехфазная и подсоединяется к печи через предохранители FU. Включение и выключение нагревательных элементов осуществляется с помощью контактора. Стабилизация температуры обеспечивается системой автоматического регулирования (САР).
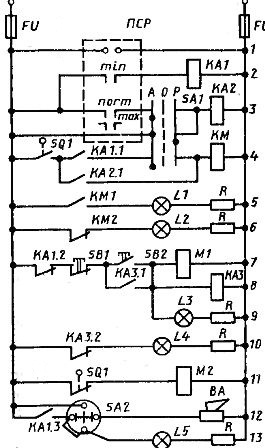
Рис. 2. Электрическая схема регулирования температуры рабочего пространства камерной электрической печи с защитной атмосферой
Схема управления состоит из 13 цепей. По функциональному признаку их можно разделить на цепи управления, цепи защиты и информационные цепи. Управление осуществляется: температурой в рабочем пространстве печи (автоматическое и ручное в случае выхода САР из строя), подачей защитной атмосферы в печь, подачей газовой завесы. Информационные цепи служат для оповещения обслуживающего персонала о различных режимах работы печи с помощью световых и звуковых сигналов.
В печи имеется одна зона. Регулирование температуры осуществляется с помощью САР, состоящей из термопары, компенсационных проводов, потенциометра ПСР, промежуточных реле КА1 и КА2, контактора КМ и, наконец, самой печи СНЗ-4,0.8,2.6/10. Потенциометр ПСР связан со схемой управления с помощью цепей 1, 2 а 3. Цепь 1 служит для питания самого прибора ПСР.
Цепи 2 и 3 содержат минимальный (min) и нормальный (norm) контакты терморегулятора ПСР. Максимальный контакт (max) ПСР в схеме не использован. В цепях 2 и 3 формируется управляющий сигнал, который с помощью промежуточных реле КА1 и КА2 усиливается до значения, необходимого для приведения в действие катушки исполнительного элемента (контактор КМ). Таким образом, КА1 и КА2 играют роль усилителей сигнала по мощности.
В цепях 3 и 4 имеются контакты универсального переключателя, рассчитанного на три положения: автоматическое (А), выключено (О) и ручное (Р). Каждое из этих положений соответствует определенному режиму работы печи: автоматическое управление температурой в печи, печь выключена, ручное управление температурой (только при наладке режимов или в случае выхода САР из строя).
С помощью цепи 4 включается контактор и, следовательно, сами нагревательные элементы печи. Контактор может включиться только в том случае, если дверца печи будет закрыта. Последнее обеспечивается введением в цепь 4 путевого выключателя SQ1, выключающегося при открытии дверцы печи. Непосредственное включение катушки контактора, а следовательно, и его контактов осуществляется следующим образом: при автоматическом управлении — контактами промежуточных реле КА1 и КА2, при ручном управлении — только с помощью контактов КА2.1.
Катушка КА1 включается только тогда, когда температура в печи достигает минимального значения. Катушка КА2 подсоединена к контакту, соответствующему нормальной температуре в печи. Следовательно, нагревательные элементы печи остаются включенными и в том случае, когда температура печи станет равной заданной. Нагреватели отключаются от сети только тогда, когда температура в печи станет больше нормы. Так составлены цепи, управляющие стабилизацией температуры в печи.
О том, включена печь или выключена в данный момент, нас информируют две сигнальные лампы: L1 и L2. При включенных нагревательных элементах горит сигнальная лампа L1, а при выключенных — лампа L2. Это достигается включением в цепи 5 и б контактов контактора КМ. Резисторы R в цепях 5 и 5 необходимы для понижения напряжения на сигнальных лампах с 220 В до рабочего (резисторы в цепях ламп играют роль нагрузочных сопротивлений). Цепи 7, 8 и 11 предназначены для управления подачей защитной атмосферы и газовой завесы.
В схеме имеются электромагнитные краны M1 и М2 соответственно подачи защитной атмосферы и подачи газа для создания газовой завесы в печи.
Как видно из структуры цепи 7, подать в печь защитную атмосферу можно только в том случае, если температура в печи ие снизилась до минимальной (при включении КА1 цепь 7 размыкается контактом КА1.2). Эта система является системой защиты от взрыва. Управление подачей газа в печь осуществляется вручную с помощью кнопок SB1 и SB2. Реле КАЗ введено для размножения контактов, так как M1 не имеет блокировочных контактов.
При включении M1 (а также КАЗ) одновременно загорается сигнальная лампа L3, оповещающая обслуживающий персонал о том, что газовый кран открыт. Выключение газа (с помощью кнопки SB1) сопровождается выключением и L3, при этом загорается другая сигнальная лампа — L4, которая информирует о том, что кран закрыт.
Цепи 12 и 13 информационные. С помощью пакетного переключателя SA2 можно включить сирену, оповещающую обслуживающий персонал о снижении температуры в печи до минимального значения, что является признаком какой-то неполадки (нагреватели должны были включиться еще при нормальной температуре).
Таким образом, минимальный контакт min ПСР используется в злой схеме не только как датчик для стабилизации температуры в рабочем пространстве печи, но и как датчик в системе автоматического оповещения и защиты. Система автоматического оповещения может быть выключена переводом переключателя во второе положение (цепь 13). Лампа L5 сигнализирует о том, что система автоматического оповещения отключена.

Схема трехпозиционного регулирования температуры
В трехпозиционном регуляторе регулирующий орган имеет третье положение, в котором при значении регулируемой величины, равном заданному, в объект подается такое количество энергии и вещества, которое требуется для нормальной его работы.
Схема трехпозиционного регулирования может быть получена путем некоторого преобразования рассмотренной схемы двухпозициоиного регулирования (см. рис. 1), если с помощью контактов SQ1 и SQ2 управлять тремя промежуточными реле. При замыкании контакта SQ1 включается реле K1 при замыкании SQ2 срабатывает реле К2. Если оба контакта SQ1 и SQ2 разомкнуты, то срабатывает реле КЗ. С помощью этих трех реле нагревательные элементы можно включить треугольником, звездой или выключать их, т. е. осуществлять трехпозиционное регулирование температуры.
Для создания систем автоматического регулирования, реализующих пропорциональный закон регулирования, часто используют балансное реле типа БР-3. В этом реле применяются два реохорда. Значение регулируемой величины определяет положение движка одного реохорда (датчик), а степень открытия регулирующего органа — положение движка реохорда исполнительного механизма (обратная связь).
Задача балансного реле — оказание такого воздействия на исполнительный механизм, при котором положения движков двух реохордов были бы симметричными.
В схеме балансного реле БР-3 (рис. 3) главными элементами являются поляризованное реле РП-5 и выходные реле ВР1 и ВР2. Пока положения движков симметричны, силы тока, протекающего в двух обмотках поляризованного реле, равны и, следовательно, контакты его разомкнуты. Выходные реле ВР1 и ВР2 обесточены, и их исполнительные контакты разомкнуты.
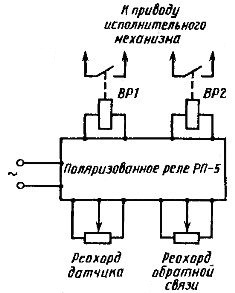
Рис. 3. Упрощенная структурная схема балансного реле типа БР-3
При отклонении регулируемой величины (например, при увеличении) изменяется положение движка реохорда датчика. В результате симметричность моста и равновесие сил тока, протекающего через обмотки поляризованного реле нарушаются, и соответствующий контакт замыкается. При этом срабатывает выходное реле, контакты которого включают исполнительный механизм, перемещающий регулирующий орган в сторону уменьшения регулируемой величины. Одновременно перемещается движок реохорда обратной связи.
Исполнительный механизм работает до тех пор, пока движок реохорда обратной связи не займет положение движка реохорда датчика, после чего опять наступает равновесие. Контакты реле размыкаются, а исполнительный механизм останавливается. Так обеспечивается постоянная связь между значением регулируемой величины и положением регулирующего органа.
Для создания систем автоматического регулирования, реализующие И-, ПИ- и другие законы, применяют различные электронные регуляторы, к числу которых относятся регуляторы типов ИРМ-240, ВРТ-2, ЭПП-17 и т. д.
 10.12.2016
10.12.2016
 Без рубрики
Без рубрики
 Нет комментариев
Нет комментариев