 Лифт представляет собой подъемную машину циклического действия, предназначенную для вертикального подъема людей и грузов. По назначению лифты разделяют на пассажирские, грузопассажирские, больничные, грузовые. В зависимости от скорости движения кабины лифты подразделяют на тихоходные (до 0,71 м/с), быстроходные (от 1 до 1,6м/с), скоростные (от 2 до 4м/с) и высокоскоростные (4 — 10м/с). Грузоподъемность пассажирских лифтов составляет от 320 до 1600кг, грузовых — от 160-5000кг. При скорости до 1,6м/с электродвигатель соединяется …
Лифт представляет собой подъемную машину циклического действия, предназначенную для вертикального подъема людей и грузов. По назначению лифты разделяют на пассажирские, грузопассажирские, больничные, грузовые. В зависимости от скорости движения кабины лифты подразделяют на тихоходные (до 0,71 м/с), быстроходные (от 1 до 1,6м/с), скоростные (от 2 до 4м/с) и высокоскоростные (4 — 10м/с). Грузоподъемность пассажирских лифтов составляет от 320 до 1600кг, грузовых — от 160-5000кг. При скорости до 1,6м/с электродвигатель соединяется …
Лифт представляет собой подъемную машину циклического действия, предназначенную для вертикального подъема людей и грузов. По назначению лифты разделяют на пассажирские, грузопассажирские, больничные, грузовые.
В зависимости от скорости движения кабины лифты подразделяют на тихоходные (до 0,71 м/с), быстроходные (от 1 до 1,6м/с), скоростные (от 2 до 4м/с) и высокоскоростные (4 — 10м/с). Грузоподъемность пассажирских лифтов составляет от 320 до 1600кг, грузовых — от 160-5000кг. При скорости до 1,6м/с электродвигатель соединяется с канатоведущим шкивом через редуктор, если скорость выше, то применяют безредукторные электроприводы.
При большом разнообразии вариантов конструкций пассажирских и грузовых лифтов основными узлами оборудования для них являются подъемная лебедка, канаты, кабина, противовес, механический тормоз и аппаратура управления. Современные лифты имеют систему подвеса с противовесом и с уравновешивающим канатом.

Кабина перемещается вдоль вертикальных направляющих. Кабина подвешена к канатам, огибающим канатоведущий и направляющий шкивы приводной электрической лебедки. На концах каната укреплен противовес, движущийся по направляющим. Масса противовеса равна сумме массы кабины и (0,42 — 0,5) массы груза (или половине наиболее вероятной нагрузки кабины).
Электроприводы лифтов
В лифтах и грузовых подъемниках типы электроприводов выбираются в зависимости от скорости движения, этажности здания и требуемой точности остановки. В настоящее время применяют следующие электроприводы:
а) для зданий до 17 этажей используются тихоходные и быстроходные лифты со скоростью от 0,7 до 1,4м/с грузоподъемностью 320, 400кг. В этих лифтах применяют электропривод с асинхронным двухскоростным электродвигателем с короткозамкнутым ротором,
б) для быстроходных пассажирских лифтов со скоростью 1,6м/с предназначенных для зданий до 25 этажей применяют электропривод по системе тиристорный регулятор напряжения (ТРН) с двухскоростным асинхронным двигателем (ТРН-АДД).

Наличие регулируемого электропривода обеспечивает высокую плавность процессов разгона и замедления, высокую точность остановки на этаже (±20мм), отсутствие участка пониженной скорости перед остановкой. Вторая обмотка двигателя служит для получения малой скорости при ревизии,
в) для скоростных и высокоскоростных лифтов применяются электроприводы постоянного тока по системе тиристорный преобразователь-двигатель ТП-Д и переменного тока по системе преобразователь частоты — короткозамкнутый асинхронный электродвигатель ГГЧ-АД.
Тиристорный электропривод лифта типа УЛМП-25-16
Питание электропривода (рис.1) осуществляется от реверсивного тиристорного регулятора напряжения UZ (ТРН) при пуске и установившемся движении и от отдельного выпрямителя собранного по однофазной мостовой схеме UZ1 для питания обмотки статора при динамическом торможении.
Система обеспечивает параметрическое фазовое регулирование скорости вращения короткозамкнутого асинхронного электродвигателя. Система автоматического регулирования выполнена на однокристальной микро ЭВМ типа КР1816ВБ031, которая осуществляет непосредственное цифровое регулирование скорости вращения приводного двухскоростного асинхронного электродвигателя.
Автоматическая система регулирования позволяет обеспечить высокую точность поддержания заданной скорости и остановки на уровне требуемого этажа непосредственно в заданную точку без участка пониженной скорости. Вторая обмотка двигателя включается только при ревизии.
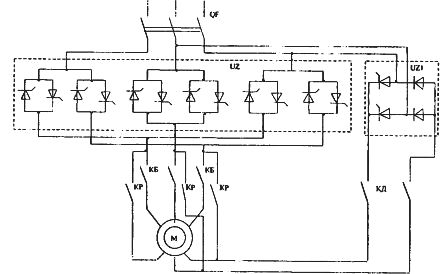
Рис. 1. Схема тиристорного электропривода лифта
Тормозные электромагниты
Грузоподъемные механизмы лифтов снабжаются специальными тормозными устройствами с длинноходовыми и короткоходовыми электромагнитами постоянного тока, которые подключаются к сети напряжением 220 или 380 В через выпрямитель.
Аппараты управления лифтов
Этажные переключатели предназначены для коммутации цепей управление движением. Они регистрируют положение кабины, автоматически выбирают направление движения («верх» или «низ») и дают команду на отключение электропривода при остановке. Конструктивно это трехпознцнонные рычажные переключатели (путевые командоаппараты) на три положения (1-0-2), имеющие подвижные (на рычаге) к неподвижные (на корпусе) контакты.
Этажные переключатели устанавливаются в шахте на уровне этажа, а на кабине — фасонная отводка, которая действует на рычаг этажного переключателя.
При ходе кабины «вверх» поворотом рычага замыкается одна группа неподвижных контактов, а «вниз»— другая. Когда кабина находится на уровне этажа, этажный переключатель находится в нейтральном положении «О», а неподвижные контакты разомкнуты.

Переключатели скорости предназначены для подачи импульса на снижение скорости перед остановкой кабины. Применяются в быстроходных лифта с электроприводом двухскоростного исполнения. Они построены по принципу действия этажных переключателей, но конструктивный вид имеют другой. Переключатели скорости устанавливаются в стволе шахты комплектно выше и ниже этажа на расстоянии от 0,5 до 0,6 м.
Рычажные переключатели предназначены для управлении грузовыми лифтами с проводником. Конструктивно это трехпозицнонные рычажные переключатели с самовозвратом рукоятки в нейтральнее положение («верх»-0-«низ»), установленные в кабине. Поворотом рукоятки выбирается направлен не движения, что достигается замыканием пары неподвижных контактов. При отпускании рукоятки контакты размыкаются и двигатель останавливается (отключается). Рычажные переключатели одновременно используется как конечный выключатель в крайних положениях кабины. Это достигается действием на ролик рычага специальных направляющих в стволе шахты.
Индуктивные датчики предназначены для применения в быстроходных лифтах. Схема таких датчиков на переменном и выпрямленном токе показана на рис. 2.

Рис. 2. Принципиальная электрическая схема индуктивных датчиков на переменном (а) и выпрямленном (б) токе
В стволе шахты устанавливается П-образный шихтованный магнитопровод из стали 3, а на кабине стальная скоба 4 представляющая собой магнитный шунт. На магнитопроводе находится катушка с обмоткой 2 к которой подключается реле управления 1 непосредственно или через выпрямитель Вп. При уходе скобы (магнитопровод размыкается) индуктивное сопротивление катушки мало, что обеспечит срабатывание реле управления. Если стальная скоба перекрывает магнитопровод, резко возрастает индуктивное сопротивление катушки и реле отпускает.
Надежность и четкость срабатывания реле управления обеспечена включением емкости С параллельно катушке, которая выбирается из условия получения близкого к резонансу токов режима. Применение выпрямителя для питания реле управления повышает надежность срабатывания магнитной системы реле.
Кроме того, в путевых датчиках нашли широкое применение устройства с герметичными контактами (герконы). Применение индуктивных датчиков устраняет такие недостатки этажных переключателей и переключателей скорости, как шумность и радиопомехи, возникающие при работа контактных устройств.
Магнитная отводка — это электромагнитное устройство, устанавливаемое на кабине и контролирующее работу замков дверей шахты. Упор магнитной отводки соединен с якорем электромагнита отводки. При нахождении кабины на этаже электромагнит отводки обесточен, упор под действием пружины отводит защелку замка двери шахты, позволяя ее открыть.
При движении электромагнит отводки под питанием — защелка введена, что запрещает открытие двери. Такие защелки применяются в лифтах старой конструкции (или модернизированных) с ручным приводом дверей шахты.

Автоматика лифтов
Основным отличием работы лифтов и подъемников является их многопозиционность, выражающаяся в том, что механизмы могут занимать большое число фиксированных положений. Поэтому после каждой остановки приходится решать логическую задачу о выборе последующего перемещения. Решение этой задач в настоящее время осуществляется с помощью логических микросхем и микропроцессоров. Перед схемой управления лифтами ставятся следующие задачи: контроль положения кабины в шахте, автоматический выбор направления движения, определение времени начала торможения, точной остановки кабины на этаже, автоматического открывания и закрывания дверей и защиты электроприводов и лифта.
Командные сигналы, задающие программу движения кабины, разделяются на два типа: «приказы», поступающие из кабины, и «вызовы», поступающие с этажных площадок. Команды подаются кнопками, расположенными соответственно в кабине и на этажных площадках. В зависимости от реакции на команды и способы их отработки различаются схемы раздельного и собирательного управления. При раздельном принципе управления схема воспринимает и отрабатывает только одну команду и во время ее выполнения не реагирует на другие приказы и вызовы.
Такая схема наиболее проста в реализации, но ограничивает возможную производительность лифта и поэтому применяется лишь для лифтов жилых домов высотой до девяти этажей с относительно небольшим потоком пассажиров. При собирательном принципе управления схема воспринимает одновременно несколько команд и выполняет их в определенной очередности, обычно в порядке следования этажей.

Основой системы управления лифтами является поэтажный тактовый опрос. Тактовый опрос может быть маятниковым, когда опрос производится в двух направлениях, снизу вверх и сверху вниз и одного направления, например, только сверху вниз. Чаще применяется маятниковый опрос.