 В статье рассмотрены устройство, принцип действия и
В статье рассмотрены устройство, принцип действия и
примеры использования электрических систем синхронного вращения (электрический
вал) в станках и установках. Допустим,
что два вала, не имеющие механической связи друг с другом, должны
вращаться с одинаковыми скоростями, не поворачиваясь друг относительно
друга. Для обеспечения такого синхронного и синфазного вращения с
двигателями, которые вращают соответственно валы, связывают вспомогательные асинхронные машины с фазными роторами …
В статье рассмотрены устройство, принцип действия и примеры использования электрических систем синхронного вращения (электрический вал) в станках и установках.
Допустим, что два вала, не имеющие механической связи друг с другом, должны вращаться с одинаковыми скоростями, не поворачиваясь друг относительно друга. Для обеспечения такого синхронного и синфазного вращения с двигателями Д1 и Д2, которые вращают соответственно валы I и II (рис. 1), связывают вспомогательные асинхронные машины А1 и А2 с фазными роторами. Роторные обмотки этих машин соединяют друг с другом встречно.
Если частоты вращения обеих машин и положения их роторов одинаковые, то электродвижущие силы, наведенные в обмотках роторов машин А1 и А2, равны и направлены навстречу друг другу (рис. 2, а), и ток в цепи роторов не протекает.
Предположим, что направление вращения поля вспомогательных машин совпадает с направлением вращения их роторов. При замедлении вращения машины А2 ее ротор отстанет от ротора А1, вследствие чего э. д. с. Ер2, наведенная в обмотке ротора, сместится по фазе в сторону опережения (рис. 2, б), и в цепи роторов машин А1 и А2 под действием векторной суммы э. д. с. Е появится уравнительный ток I.
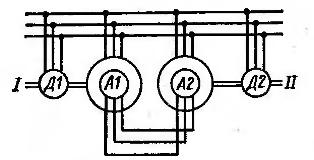
Рис. 1. Схема синхронной связи
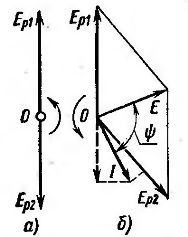
Рис. 2. Векторные диаграммы системы синхронной связи
Вектор тока I будет отставать от вектора э. д. с. Е на угол . Проекция вектора тока I на вектор э. д. с. Ер2 совпадает с этим вектором по направлению. Проекция вектора тока на вектор э. д. с. Ер1 направлена навстречу ему. Из этого следует, что машина А2 будет работать в режиме двигателя, а машина А1 — в режиме генератора. При этом вал машины А2 получит ускорение, а вал машины A1 — замедление. Таким образом, машины разовьют моменты, восстанавливающие синхронное вращение валов I и II и прежнее согласованное положение в пространстве роторов машин А1 и А2. Роторы этих машин могут вращаться как по направлению вращения поля, так и в противоположном направлении.
Данная система носит название электрической системы синхронного вращения. Ее называют также электрическим валом. Система синхронного вращения может заменить, например, ходовые винты у токарно-винторезных станков.
Так как цепи подачи металлорежущих станков по сравнению с цепями главного движения потребляют обычно малую мощность, то для синхронизации главного движения с подачей может быть применена более простая схема синхронного вращения (рис. 3). В этом случае неизбежно постоянное рассогласование между положениями роторов машин А1 и А2, без чего в цепи ротора машины А2 не было бы тока и она не смогла бы преодолеть момент сил сопротивления цепи подачи. Так как машина А2 получает питание от статора и ротора, то при данной системе электрического вала требуется шестипроводная подводка к двигателю, установленному во многих случаях на движущемся узле станка, условно показанном на рисунке штриховой линией.
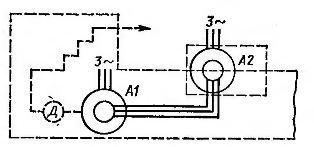
Рис. 3. Системы синхронной связи тяжелого токарно-винторезного станка
В пределах углового рассогласования, не превышающего 90°, электрический синхронизирующий момент возрастает. Для обеспечения значительного синхронизирующего момента машины синхронной связи при всех возможных угловых частотах вращения должны работать с большими скольжениями (не менее 0,3 — 0,5). Поэтому во избежание недопустимого нагрева эти машины должны быть достаточно больших размеров.
Мощность машин дополнительно увеличивают, стремясь исключить влияние колебаний нагрузки и сил трения. Применяют также механические передачи, понижающие частоту вращения валов станка, а следовательно, и величину угловой ошибки, приведенной к валу станка. Перед началом работы электрического вала асинхронные машины А1 и А2 включают на однофазное питание. При этом ротор машины А2 занимает исходное положение, согласованное с положением ротора машины А1.
Системы синхронного вращения рационально применять для тяжелых станков, так как изготовление длинных ходовых винтов связано со значительными трудностями. Кроме того, с увеличением длины винтов или валов, вследствие их скручивания, точность согласования взаимного расположения частей станка уменьшается. В системе электрического вала расстояние между валами никакого влияния на точность работы оказать не может.
При использовании электрического вала исключаются, механические связи суппортов со шпинделем и сильно упрощается кинематическая схема. Существенным недостатком систем электрического вала в тяжелых станках является возможность порчи дорогостоящей заготовки при перерыве в электроснабжении, так как при этом сразу возникает рассогласование. В некоторых случаях при такой аварии порча заготовки может быть предотвращена путем быстрого автоматического отвода инструмента.
Для станкостроения интерес представляет схема с двумя одинаковыми асинхронными двигателями с фазными роторами (рис. 4). Так как цепь обоих роторов замкнута на реостат R, то при подключении двигателей к сети переменного ток