 Технические аспекты применения частотных преобразователей. В
Технические аспекты применения частотных преобразователей. В
настоящее время, асинхронный электродвигатель стал основным устройством
в большинстве электроприводов. Все чаще для управления им используется
частотный преобразователь
– инвертор с ШИМ регулированием. Такое управление дает массу
преимуществ, но и создает некоторые проблемы выбора тех или иных
технических решений. Попробуем разобраться в них более подробно …
Технические аспекты применения частотных преобразователей
В настоящее время, асинхронный электродвигатель стал основным устройством в большинстве электроприводов. Все чаще для управления им используется частотный преобразователь – инвертор с ШИМ регулированием. Такое управление дает массу преимуществ, но и создает некоторые проблемы выбора тех или иных технических решений. Попробуем разобраться в них более подробно.
Устройство частотных преобразователей
Разработка и производство широкой номенклатуры мощных высоковольтных транзисторных IGBT модулей предоставили возможность реализации многофазных силовых переключателей, управляемых непосредственно с помощью цифровых сигналов. Программируемые вычислительные средства позволили на входах коммутаторов сформировать числовые последовательности, обеспечивающие сигналы частотного управления асинхронными электродвигателями. Разработка и массовый выпуск однокристальных микроконтроллеров, обладающих большими вычислительными ресурсами, обусловили возможность перехода к следящим электроприводам с цифровыми регуляторами.
Силовые преобразователи частоты, как правило, реализуют по схеме, содержащей выпрямитель на мощных силовых диодах или транзисторах и инвертор (управляемый коммутатор) на IGBT транзисторах, шунтированных диодами (рис. 1).
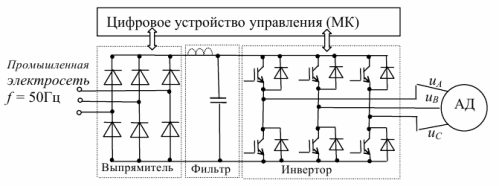
Рис. 1. Схема частотного преобразователя
Входной каскад выпрямляет подаваемое синусоидальное напряжение сети, которое после сглаживания с помощью индуктивно-емкостного фильтра служит источником электропитания управляемого инвертора, вырабатывающего при действии команд цифрового управления сигнал с импульсной модуляцией, который формирует в обмотках статора токи синусоидальной формы с параметрами, обеспечивающими требуемый режим работы электродвигателя.
Цифровое управление силовым преобразователем осуществляется с помощью микропроцессорных аппаратных средств и соответствующим поставленным задачам программным обеспечением. Вычислительное устройство в режиме реального времени вырабатывает сигналы управления 52 модулями, а также производит обработку сигналов измерительных систем, контролирующих работу привода.
Силовые устройства и управляющие вычислительные средства объединены в составе конструктивно оформленного промышленного изделия, называемого частотным преобразователем.

В промышленном оборудовании применяются два основных вида частотных преобразователей:
-
фирменные преобразователи для конкретных типов оборудования.
-
универсальные преобразователи частоты предназначены для многоцелевого управления работой АД в задаваемых пользователем режимах.
Установку и контроль режимов работы частотного преобразователя можно производить с помощью пульта управления, оснащенного экраном для индикации введенной информации. В простом варианте скалярного регулирования частоты можно воспользоваться набором простых логических функций, имеющихся в заводских установках контроллера, и встроенным ПИД-регулятором.
Для осуществления более сложных режимов управления с использованием сигналов с датчиков обратных связей необходимо разработать структуру САУ и алгоритм, который следует запрограммировать с помощью подключаемого внешнего компьютера.
Большинство производителей выпускает целый ряд преобразователей частоты, отличающихся входными и выходными электрическими характеристиками, мощностью, конструктивным исполнением и другими параметрами. Для подключения к внешнему оборудованию (электросети, двигателю) могут быть использованы дополнительные внешние элементы: магнитные пускатели, трансформаторы, дроссели.
Типы сигналов управления
Необходимо делать различия между сигналами различных типов и для каждого из них использовать отдельный кабель. Различные типы сигналов могут оказывать влияние друг на друга. На практике такое разделение встречается часто, например кабель от датчика давления может быть подключен непосредственно к преобразователю частоты.
На рис. 2 приведен рекомендуемый вариант подключения преобразователя частоты при наличии различных цепей и сигналов управления.
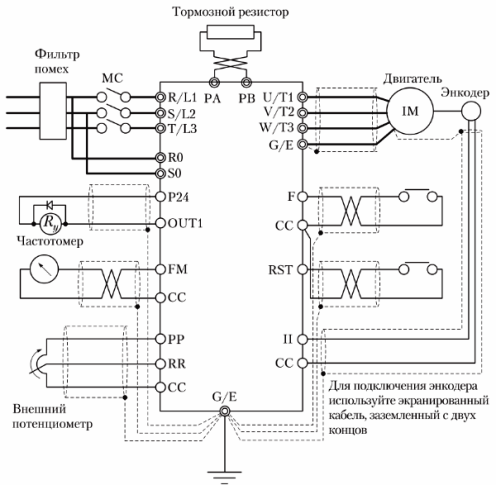
Рис. 2. Пример подключения силовых цепей и цепей управления преобразователя частоты
Можно выделить следующие типы сигналов:
-
аналоговые — сигналы напряжения или тока (0…10 В, 0/4…20 мА), значение которых меняется медленно или редко, обычно это сигналы управления или измерения;
-
дискретные сигналы напряжения или тока (0…10 В, 0/4…20 мА), которые могут принимать только два редко изменяющихся значения (высокое или низкое);
-
цифровые (данные) — сигналы напряжения (0…5 В, 0…10 В), которые меняются быстро и с высокой частотой, обычно это сигналы портов RS232, RS485 и т.п.;
-
релейные — контакты реле (0…220 В переменного тока) могут включать индуктивные токи в зависимости от подключенной нагрузки (внешние реле, лампы, клапаны, тормозные устройства и т.д.).
Выбор мощности частотного преобразователя
 При выборе мощности частотного преобразователя необходимо основываться не только на мощности электродвигателя, но и на номинальных токах и напряжениях преобразователя и двигателя. Дело в том, что указанная мощность частотного преобразователя относится только к эксплуатации его со стандартным 4-х полюсным асинхронным электродвигателем в стандартном применении.
При выборе мощности частотного преобразователя необходимо основываться не только на мощности электродвигателя, но и на номинальных токах и напряжениях преобразователя и двигателя. Дело в том, что указанная мощность частотного преобразователя относится только к эксплуатации его со стандартным 4-х полюсным асинхронным электродвигателем в стандартном применении.
Реальные приводы имеют много аспектов, которые могут привести к росту токовой нагрузке привода, например, при пуске. В общем случае, применение частотного привода позволяет снизить токовые и механические нагрузки за счет плавного пуска. Например, пусковой ток снижается с 600% до 100-150% от номинального.
Работа привода на пониженной скорости
Необходимо помнить, что хотя частотный преобразователь легко обеспечивает регулирование по скорости 10:1, но при работе двигателя на низких оборотах мощности собственного вентилятора может не хватать. Необходимо следить за температурой двигателя и обеспечить принудительную вентиляцию.
Электромагнитная совместимость
 Поскольку частотный преобразователь мощный источник высокочастотных гармоник, то для подключения двигателей нужно использовать экранированный кабель минимальной длины. Прокладку такого кабеля необходимо вести на расстоянии не менее 100 мм от других кабелей. Это минимизирует наводки. Если нужно пересечь кабели, то пересечение делается под углом 90 градусов.
Поскольку частотный преобразователь мощный источник высокочастотных гармоник, то для подключения двигателей нужно использовать экранированный кабель минимальной длины. Прокладку такого кабеля необходимо вести на расстоянии не менее 100 мм от других кабелей. Это минимизирует наводки. Если нужно пересечь кабели, то пересечение делается под углом 90 градусов.
Питание от аварийного генератора
Плавный пуск, который обеспечивает частотный преобразователь позволяет снизить необходимую мощность генератора. Так как при таком пуске ток снижается в 4-6 раз, то в аналогичное число раз можно снизить мощность генератора. Но все равно, между генератором и приводом должен быть установлен контактор, управляемый от релейного выхода частотного привода. Это защищает частотный преобразователь от опасных перенапряжений.
Питание трехфазного преобразователя от однофазной сети
Трехфазные частотные преобразователи могут быть запитаны от однофазной сети, но при этом их выходной ток не должен превышать 50% от номинального.

Экономия электроэнергии и денег
Экономия происходит по нескольким причинам. Во-первых, за счет роста косинуса фи до значений 0.98, т.е. максимум мощности используется для совершения полезной работы, минимум уходит в потери. Во-вторых, близкий к этому коэффициент получается на всех режимах работы двигателя.
Без частотного преобразователя, асинхронные двигатели на малых нагрузках имеют косинус фи 0.3-0.4. В-третьих, нет необходимости в дополнительных механических регулировках (заслонках, дросселях, вентилях, тормозах и т.д.), все делается электронным образом. При таком устройстве регулирования, экономия может достигать 50%.
Синхронизация нескольких устройств
 За счет дополнительных входов управления частотного привода можно синхронизировать процессы на конвейере или задавать соотношения изменения одних величин, в зависимости от других. Например, поставить в зависимость скорость вращения шпинделя станка от скорости подачи резца. Процесс будет оптимизирован, т.к. при увеличении нагрузки на резец, подача будет уменьшена и наоборот.
За счет дополнительных входов управления частотного привода можно синхронизировать процессы на конвейере или задавать соотношения изменения одних величин, в зависимости от других. Например, поставить в зависимость скорость вращения шпинделя станка от скорости подачи резца. Процесс будет оптимизирован, т.к. при увеличении нагрузки на резец, подача будет уменьшена и наоборот.
Защита сети от высших гармоник
Для дополнительной защиты, кроме коротких экранированных кабелей, используются сетевые дроссели и шунтирующие конденсаторы. Дроссель, кроме того, ограничивает бросок тока при включении.
Правильный выбор класса защиты
Для безотказной работы частотного привода необходим надежный теплоотвод. Если использовать высокие классы защиты, например IP 54 и выше, то трудно или дорого добиться такого теплоотвода. Поэтому, можно использовать отдельный шкаф с высоким классом защиты, куда ставить модули с меньшим классом и осуществлять общую вентиляцию и охлаждение.
Параллельное подключение электродвигателей к одному частотному преобразователю
С целью снижения затрат, можно использовать один частотный преобразователь для управления несколькими электродвигателями. Его мощность нужно выбирать с запасом 10-15% от суммарной мощности всех электродвигателей. При этом нужно минимизировать длины моторных кабелей и очень желательно ставить моторный дроссель.
Большинство частотных преобразователей не допускают отключение или подключение двигателей с помощью контакторов во время работы частотного привода. Это производится только через команду стоп привода.
Задание функции регулирования
 Для получения максимальных показателей работы электропривода, таких как: коэффициент мощности, коэффициент полезного действия, перегрузочная способность, плавность регулирования, долговечность, нужно правильно выбирать соотношение между изменением рабочей частоты и напряжения на выходе частотного преобразователя.
Для получения максимальных показателей работы электропривода, таких как: коэффициент мощности, коэффициент полезного действия, перегрузочная способность, плавность регулирования, долговечность, нужно правильно выбирать соотношение между изменением рабочей частоты и напряжения на выходе частотного преобразователя.
Функция изменения напряжения зависит от характера момента нагрузки. При постоянном моменте, напряжение на статоре электродвигателя должно регулироваться пропорционально частоте (скалярное регулирование U/F = const). Для вентилятора, например, другое соотношение – U/F*F = const. Если увеличиваем частоту в 2 раза, то напряжение нужно увеличить в 4 (векторное регулирование). Есть приводы и с более сложными функциями регулирования.
Преимущества использования регулируемого электропривода с частотным преобразователем
Кроме повышения КПД и энергосбережения такой электропривод позволяет получить новые качества управления. Это выражается в отказе от дополнительных механических устройств, создающих потери и снижающих надежность систем: тормозов, заслонок, дросселей, задвижек, регулирующих клапанов и т.д. Торможение, например, может быть осуществлено за счет обратного вращения электромагнитного поля в статоре электродвигателя. Меняя только функциональную зависимость между частотой и напряжением, мы получаем другой привод, не меняя ничего в механике.
Чтение документации
Следует заметить, что хотя частотные преобразователи похожи друг на друга и освоив один, легко разобраться с другим, тем не менее, необходимо тщательно читать документацию. Некоторые производители накладывают ограничения на использование своей продукции, а при их нарушении снимают изделия с гарантии.
Это может быть вам интересно: Регулируемый электропривод как средство энергосбережения