 В системах автоматики применяются три способа регулирования: по отклонению регулируемой величины, по возмущению (по нагрузке), комбинированный. Способ регулирования по отклонению регулируемой величины рассмотрим на примере системы регулирования частоты вращения двигателя постоянного тока. При работе двигатель, являясь объектом регулирования, испытывает на себе действие различных возмущений (изменения нагрузки на валу двигателя, напряжения питающей сети, частоты вращения двигателя, приводящего во вращение якорь генератора …
В системах автоматики применяются три способа регулирования: по отклонению регулируемой величины, по возмущению (по нагрузке), комбинированный. Способ регулирования по отклонению регулируемой величины рассмотрим на примере системы регулирования частоты вращения двигателя постоянного тока. При работе двигатель, являясь объектом регулирования, испытывает на себе действие различных возмущений (изменения нагрузки на валу двигателя, напряжения питающей сети, частоты вращения двигателя, приводящего во вращение якорь генератора …
В системах автоматики применяются три способа регулирования:
1) по отклонению регулируемой величины,
2) по возмущению (по нагрузке),
3) комбинированный.
Способ регулирования по отклонению регулируемой величины рассмотрим на примере системы регулирования частоты вращения двигателя постоянного тока (рис. 1).
При работе двигатель Д, являясь объектом регулирования, испытывает на себе действие различных возмущений (изменения нагрузки на валу двигателя, напряжения питающей сети, частоты вращения двигателя, приводящего во вращение якорь генератора Г, изменение температуры окружающей среды, приводящее в свою очередь к изменению сопротивления обмоток, а следовательно, и токов и т. п.).
Все эти возмущения вызовут отклонение частоты вращения двигателя Д, что повлечет за собой изменение э. д. с. тахогенератора ТГ. В цепь тахогенератора ТГ включен реостат Р1. Напряжение U0, снимаемое с реостата P1 включено встречно с напряжением тахогенератора ТГ. В результате этого получается разность напряжений е = U0 — Uтг, которая через усилитель У подается на двигатель ДП, перемещающий ползунок реостата Р. Напряжение U0 соответствует заданному значению регулируемой величины — частоте вращения о, а напряжение тахогенератора Uтг — текущему значению частоты вращения.
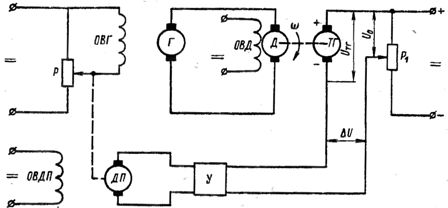
Рис. 1. Принципиальные схемы управления частотой вращения двигателя постоянного тока по замкнутому циклу: Р — реостат, ОВГ — обмотка возбуждения генератора, Г — генератор, ОВД — обмотка возбуждения двигателя, Д — двигатель, ТГ — тахогенератор, ДП — двигатель привода ползунка реостата, У — усилитель.
Если под действием возмущений разность между этими величинами (отклонение) превысит заданный предел, то на регулятор поступит задающее воздействие в виде изменения тока возбуждения генератора, которое заставит это отклонение уменьшиться. В общем случае система, работающая по способу отклонения, представлена схемой на рис. 2, а.
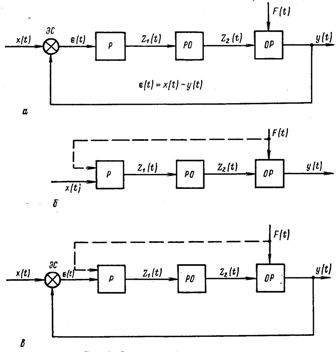
Рис. 2. Схемы способов регулирования: а — по отклонению, б — по возмущению, в — комбинированный, Р — регулятор, РО — регулирующий орган, ОР — объект регулирования, ЭС — элемент сравнения, х(t) — задающее воздействие, Z1(t) и Z2 (t) — внутренние регулирующие воздействия, у(t) — регулируемая величина, F(t) — возмущающее воздействие.
Отклонение регулируемой величины приводит в действие регулирующий орган, это действие всегда направлено так, что оно уменьшает отклонение. Для получения разности величин (t) = x(t) — у (f) в систему вводится элемент сравнения ЭС.
Действие регулирующего органа при регулировании по отклонению происходит независимо от того, по какой причине произошло изменение регулируемой величины. Это, несомненно, является большим достоинством данного способа.
Способ регулирования по возмущению, или компенсация возмущения, основан на том, что в системе применяются устройства, компенсирующие влияние изменения возмущающего воздействия.
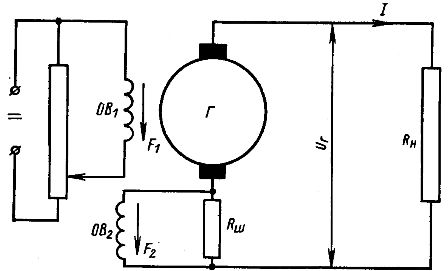
Рис. 3. Принципиальная схема регулирования напряжения генератора постоянного тока: Г — генератор, ОВ1 и ОВ2 — обмотки возбуждения генератора, Rн — сопротивление нагрузки, F1 и F2 — магнитодвижущие силы обмоток возбуждения, Rш — сопротивление.
В качестве примера рассмотрим работу генератора постоянного тока (рис. 3). Генератор имеет две обмотки возбуждения: ОВ1 включаемую параллельно якорной цепи, и ОВ2, включаемую на сопротивление Ri. Обмотки возбуждения включены так, что их м. д. с. F1 и F2 складываются. Напряжение на клеммах генератора будет зависеть от суммарной м. д. с. F = F1+F2.
При увеличении тока нагрузки I (сопротивление нагрузки Rн уменьшается) напряжение генератора Uг должно было бы уменьшиться за счет увеличения падения напряжения в якорной цепи