 Назначение телемеханических устройств — осуществление контроля и управления режимом работы рассредоточенных электрических установок с центрального пункта, который называется диспетчерским пунктом (ДП), где находится дежурный — диспетчер, в функции которого входит оперативное воздействие на энергетические установки. Телемеханические устройства подразделяются на системы телесигнализации (ТС), телеизмерения (ТИ), телеуправления (ТУ) и телелегулирования (ТР).
Назначение телемеханических устройств — осуществление контроля и управления режимом работы рассредоточенных электрических установок с центрального пункта, который называется диспетчерским пунктом (ДП), где находится дежурный — диспетчер, в функции которого входит оперативное воздействие на энергетические установки. Телемеханические устройства подразделяются на системы телесигнализации (ТС), телеизмерения (ТИ), телеуправления (ТУ) и телелегулирования (ТР).
Назначение телемеханических устройств — осуществление контроля и управления режимом работы рассредоточенных электрических установок с центрального пункта, который называется диспетчерским пунктом (ДП), где находится дежурный — диспетчер, в функции которого входит оперативное воздействие на энергетические установки. Телемеханические устройства подразделяются на системы телесигнализации (ТС), телеизмерения (ТИ), телеуправления (ТУ) и телелегулирования (ТР).
Система ТС передает с контролируемого пункта (КП) на ДП сигналы о положении объектов, а также аварийные и предупредительные сигналы.
Система ТИ передает на ДП количественные данные о состоянии контролируемого объекта.
Система телеуправления ТУ передает с ДП на КП команды управления. Система ТР передает с ДП на КП команды регулирования.
Сигналы с ДП на КП передаются по каналам связи (КС). В качестве линий используются проводные линии (контрольные кабели, телефонные кабели и т.д.), линии передачи энергии (воздушные линии В.П., распределительная сеть Н.Н. и т.д.) и специальные линии связи (радио-релейные и т.д.).
Процесс передачи сигналов изображен на рис. 1, где ИС — источник сигнала, П -передающее устройство, ЛС — линия связи, ПР — приемное устройство, ПС — приемник сигнала (объект).
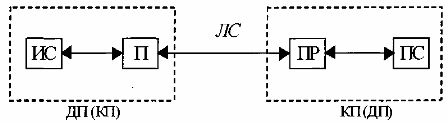
Рис.1. Схема передачи сигналов по линии связи с диспетчерского пункта на контролируемый пункт.
При ТС, ТИ на КП находятся ИС, П, на ДП — ПР, ПС. По ЛС передаются известительная (осведомительная) информация, дискретные сигналы, отражающие конечное число состояний объекта (ТС), и аналоговые или дискретные сигналы, отображающие множество состояний (ТИ).
При ТУ, ТР на ДП имеем ИС, П, на КП — ПР, ПС. По ЛС передаются распорядительная (управляющая) информация, дискретные сигналы для управления конечным числом состояний объекта (ТУ) и аналоговые или дискретные сигналы для множества состояний объекта (ТР).
Таким образом направление сигналов для ТС, ТИ — одностороннее, а для ТУ, ТР -двустороннее, поскольку для состояния ТУ необходимо отразить состояние объекта средствами ТС, а при ТР — средствами ТИ. Известительная и распредительная может иметь качественный (двоичный) характер и количественный (множественный) -аналоговый либо дискретный.
Поэтому системы телемеханики часто выполняют двойные функции: ТУ — ТС и ТР -ТИ. Так как сигналы подвергаются действию помех, то для повышения помехоустойчивости и избирательности приемного устройства, аналоговые сигналы кодируются, то есть подвергаются дискретизации и представлению информации в виде дискретных сигналов — сигналам по алгоритмам кодирования, когда каждому сигналу соответствует своя комбинация дискретных сигналов.
Кодирование сигналов
Преимуществом устройств телемеханики в сравнении с устройствами дистанционного контроля и управления является уменьшение числа каналов связи. В дистанционных устройствах каналы связи разделены пространственно — каждому каналу соответствует своя ЛС. В устройствах телемеханики линия связи одна, а каналы связи образуются благодаря временному, частотному, фазовому, кодовому и др. способами разделения каналов, причем по одному каналу передается значительно большее количество известительной и распорядительной информации.
Сигнал дискретной информации — это некоторое количество импульсов, отличающихся друг от друга качественными признаками (полярность, фаза, длительность, амплитуда и т.д.).
Одноэлементное кодирование сигнала позволяет передать ограниченный объем информации даже при использовании нескольких признаков. Многоэлементным кодированием можно передать значительно больший объем информации даже при использовании только двух признаков.
Одноэлементное кодирование широко применяется в устройствах телемеханники в связи с тем, что многие управляемые и контролируемые объекты являются двухпозиционными и требуют передачи лишь двух сигналов — команд. Многоэлементное кодирование применяется в тех случаях, когда число управляемых и контролируемых объектов велико, либо когда объекты многопозиционными и, соответственно, требуют передачи многих команд.
В ТУ — ТС коды используются для передачи независимых команд. В ТУ — ТС обычно используются в качестве избирающих признаков длительность импульсов либо частота. В системах ТИ — ТР коды используются для передачи числовых величин и называются арифметическими кодами. Основой этих кодов являются системы представления чисел кодовыми последовательностями.
Система телеуправление — телесигнализация (ТУ — ТС)
В системах ТУ — ТС передачу команды управления можно разделить на две позиции:
1) выбор данного объекта (избирание),
2) передача команды.
Разделение передаваемых по ЛС сигналов выполняется различными способами: по отдельным цепям, по времени передачи, по избирающим признакам при кодировании.
Широко распространены системы ТУ — ТС с коммутационным (по отдельным цепям), временным и частотным разделением сигналов.
Система с коммутационным разделением показана на рис. 2.
Объектом управления является выключатель с блок-контактами Bl, B2. В системе использованы четыре избирающих признака сигналов — положительная и отрицательная полярность и два уровня амплитуды, благодаря чему по одной двухпроводной линии можно передать четыре сигнала: 2 сигнала распорядительные (вкл.-откл.) и 2 сигнала известительные (откл., вкл.).
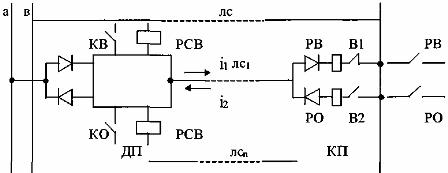
Рис. 2. Принципиальная схема системы ТУ- ТС с коммутационным разделением сигналов.
Общее число сигналов, представляемых в системе с коммутационным разделением каналов равно: N=(k-l)m
При наличии в ЛC1 минимального уровня известительного сигнала (однополупериодного распорядительного выпрямленного тока i1) срабатывает РСО. При включении KB — подаче распределительного сигнала «включить» включения выключателя, при этом замыкается В2 и в ЛС1 поступает минимальный уровень известительного сигнала (однополупериодного выпрямленного тока i2), срабатывает реле РСВ. При включении КО происходит процесс, аналогичный включению КВ.
Такие системы ТУ-ТС с коммутационным разделением сигналов используются при управлении ограниченным числом объектов при расстоянии до 1км.
Система ТУ-ТС с временным разделением сигналов передает сигналы в ЛС последовательно, могут работать циклически, постоянно контролируя объект, или спорадически — по мере надобности. Схема системы приведена на рис. 3.
Линия связи ЛС с помощью синхронно переключающихся распределителей Р1, PГ2 поочередно подключается на шагах n, n-1 к соответствующим цепям управления, а на шагах 1, 2… к цепям сигнализации.
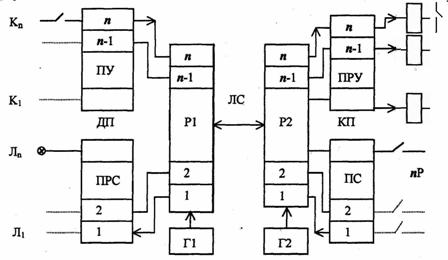
Рис. 3. Принципиальная система ТУ-ТС с временным разделением сигналов.
Избирание сигналов в этой системе может быть прямым — по одному избирающему признаку (как показано на схеме), либо комбинированным — по сочетанию избирающих признаков. При прямом избирании число сигналов, передаваемых по ЛС равно числу шагов распределителя: Nn=n При комбинированном избирании число сигналов увеличивается: Nk=kn где k — число комбинаций признаков.
В этом случае система усложняется за счет появления шифраторов и дешифраторов на стороне ДП и КП.
Система ТУ-ТС с частичным разделением сигналов передает сигналы в ЛС непрерывно, так как начало связи распределены по частоте. Таким образом по ЛС можно передавать сразу несколько сигналов. Схема системы приведена на рис. 4.
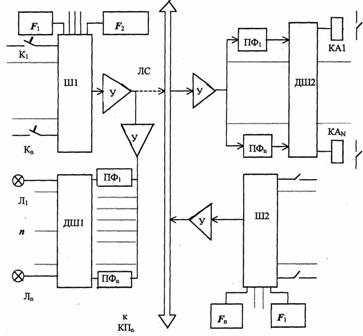
Рис. 4. Принципиальная схема системы ТУ-ТС с частотным разделением каналов
На ДП и КП имеются генераторы стабильных частот f1…fn, которые подключаются к шифраторам НИ (ДП), Ш2 (КП). Кнопками управления K1…Кn и контактами реле объекта P1…Pn.
Если кодирование одноэлементное, то каждому сигналу распределенному и известительному сигналу соответствует своя несущая частота.
Разделение сигналов производится полосовыми фильтрами ПФ на ДП и КП, благодаря чему в принципе возможна передача всех сигналов в один и тот же момент времени. Многоэлементное кодирование позволяет сократить количество генераторов и полосовых фильтров, а также сузить полосу частот сигналов. Для этого используются шифраторы и дешифраторы на стороне ДП и КП, осуществляющие кодирование и декодирование сигналов.
Систему ТУ-ТС с временным и частотным разделением каналов в настоящее время строятся на логических элементах с использованием микросхемотехники.
Системы телеизмерения (ТИ)
В системе ТИ передача продляемого параметра представляет собой три операции:
1) выбор объекта продления (измеряемого параметра)
2) преобразование величины
3) передача.
На КП измеряемый параметр преобразуется в величину, удобную для передачи на расстояние, на ДП эта величина преобразуется в показание измерительного, либо регистрирующего прибора.
Разделение передаваемых по ЛС сигналов также выполняется коммутационным, временным, частотным способом, используется и кодовое разделение сигналов. Системы ТИ разнообразны по виду сигнала. Различают системы аналоговые, импульсные и частотные.
В аналоговых системах в ЛС передается непрерывная величина (ток, напряжение). В импульсных — последовательность импульсов или кодовая комбинация. В частотных -переменный ток звуковых частот.
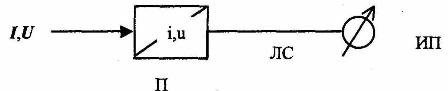
Рис. 5. Структурная схема аналоговой системы телеизмерений.
Аналоговая система ТИ показана на рис. 5. Передатчик, в качестве которого используется преобразователь П соответствующего параметра в ток (напряжение) подключается к проводной линии ЛС.
Передатчиком обычно являются преобразователи выпрямленного типа (ток, напряжение), либо индукционного (мощность, cos ). Типовые выпрямленные преобразователи тока (ВПТ-2) и напряжения (ВПН-2) показано на рис. 6 и 7.
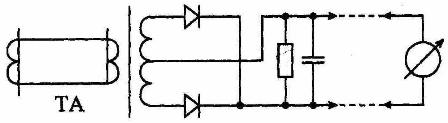
Рис. 6. Схема выпрямительного преобразователя тока (ВПТ-2)
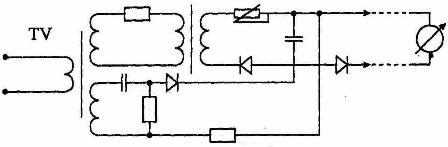
Рис. 7. Схема выпрямительного преобразователя напряжения (ВПН-2)
Импульсные системы ТИ имеют несколько разновидностей, отличающихся способами представления аналогового параметра импульсными сигналами. Существуют число-импульсные, кодо-импульсные и частотно-импульсные системы ТИ, использующие соответствующие преобразователи, показанные на рис. 8.
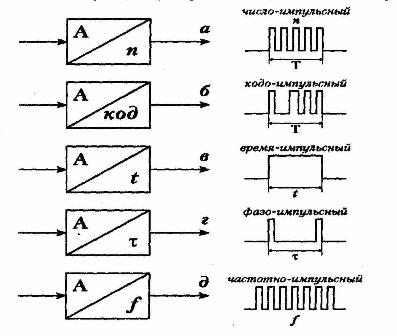
Рис. 8. Преобразователи аналогового параметра в импульсный сигнал.
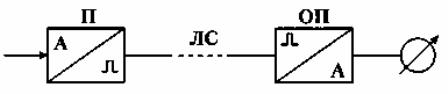
Рис. 9. Блок-схема импульсной системы ТИ
Импульсная система ТИ показана на рис. 9. Передатчиком является соответствующий преобразователь П, посылающий в ЛС импульсы, представляющие своими характерными параметрами аналоговую величину. Обратное преобразование осуществляется преобразователем ОП. Передатчики импульсных систем ТИ являются импульсными генераторами на микросхемах.
Частотные системы ТИ используют синусоидальные сигналы, своей частотой представляющие аналоговый параметр. Частотные системы используют преобразователи — генераторы синусоидальных колебаний, управляемые током, либо напряжением.
Частотная система ТИ показана блок-схемой рис. 11.
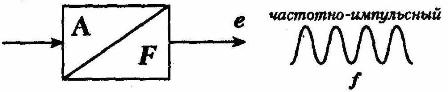
Рис. 10. Преобразователь частотной системы ТИ.

Рис. 11. Блок-схема частотной системы ТИ.
Обратное преобразование, осуществляемое ОП, может производиться как в аналоговую величину, так и в десятичный код, для индикации цифровыми приборами с АЦПУ.
Импульсные и частотные системы ТИ обладают большой дистационностью измерений, в качестве линий связи могут использовать кабельные линии и воздушные линии, имеют высокую помехоустойчивость, а так же могут легко вводиться в ЭВМ при использовании соответствующих преобразователей частота — код, код — код.