 Многоскоростные
Многоскоростные
электродвигатели — асинхронные двигатели с несколькими ступенями
частоты вращения, предназначены для привода механизмов, требующих
ступенчатого регулирования частоты вращения. Многоскоростные электродвигатели — электродвигатели специальной конструкции. Они имеют особую обмотку статора и нормальный короткозамкнутый ротор.
Наиболее простым способом получения двух разных чисел пар полюсов является устройство на статоре асинхронного двигателя двух независимых обмоток …
Многоскоростные электродвигатели — асинхронные двигатели с несколькими ступенями частоты вращения, предназначены для привода механизмов, требующих ступенчатого регулирования частоты вращения.
Многоскоростные электродвигатели — электродвигатели специальной конструкции. Они имеют особую обмотку статора и нормальный короткозамкнутый ротор.
Наиболее простым способом получения двух разных чисел пар полюсов является устройство на статоре асинхронного двигателя двух независимых обмоток. Электротехнической промышленностью выпускаются такие двигатели с синхронными скоростями вращения 1000/1500 об/мин.
Существует, однако, ряд схем переключения проводников обмотки статора, при которых одна и та же обмотка может создать различные числа полюсов. Простое и широко распространенное переключение такого рода показано на рис. 1, а и б. Катушки статора, включенные последовательно, образуют две пары полюсов (рис. 1, а). Те же катушки, включенные в две параллельные цепи, как это показано на рис. 1, б, образуют одну пару полюсов.
Промышленность выпускает многоскоростные однообмоточные электродвигатели с последовательно-параллельным переключением и с отношением скоростей 1:2 с синхронными скоростями вращения 500/1000, 750/1500, 1500/3000 об/мин.
Описанный выше способ переключения не является единственным. На рис. 1, в приведена схема, образующая такое же число полюсов, как и схема, представленная на рис. 1, б.
Наибольшее распространение в промышленности получил, однако, первый способ последовательно-параллельного переключения, так как при таком переключении от обмотки статора может быть выведено меньше проводов, а следовательно, и переключатель может быть проще.
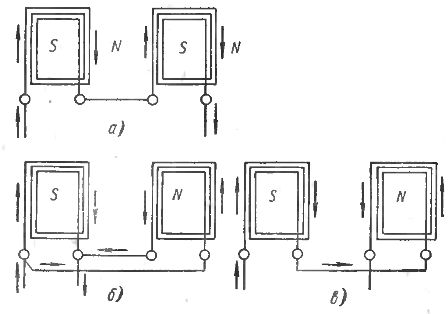
Рис. 1. Принцип переключения полюсов асинхронного двигателя.
Три фазовые обмотки могут быть включены в трехфазную сеть звездой или треугольником. На рис. 2, а и б показано широко распространенное переключение, при котором электродвигатель для получения меньшей скорости включается треугольником с последовательным соединением катушек, а для получения большей скорости — звездой с параллельным соединением катушек (так называемой двойной звездой).
Наряду с двухскоростными электропромышленность выпускает также трехскоростные асинхронные двигатели. В этом случае статор электродвигателя имеет две отдельные обмотки, одна из которых обеспечивает две скорости путем описанного выше переключения. Вторая обмотка, включаемая обычно в звезду, обеспечивает третью скорость.
При наличии на статоре электродвигателя двух независимых обмоток, каждая из которых допускает переключение полюсов, можно получить четырехскоростной электродвигатель. Числа полюсов подбирают при этом так, чтобы скорости вращения составили нужный ряд. Схема такого электродвигателя представлена на рис. 2, в.
Следует заметить, что вращающееся магнитное поле будет наводить в трех фазах неработающей обмотки три э. д. с, одинаковые по величине и сдвинутые по фазе на 120°. Геометрическая сумма этих электродвижущих сил, как известно из электротехники, равна нулю. Однако, вследствие неточной синусоидальности фазовых э. д. с. тока сети, сумма этих э. д. с. может быть отличной от нуля. В этом случае в замкнутой неработающей обмотке возникает ток, нагревающий эту обмотку.
В целях предотвращения этого явления схему переключения полюсов составляют таким образом, чтобы неработающая обмотка была разомкнута (рис. 12, в). Вследствие небольшой величины указанного выше тока у некоторых электродвигателей, разрыва замкнутого контура неработающей обмотки иногда не делают.
Выпускаются двухобмоточные трехскоростные двигатели, имеющие синхронные скорости вращения 1000/1500/3000 и 750/1500/3000 об/мин, и четырехскоростные двигатели, имеющие 500/750/1000/1500 об/мин. Двухскоростные двигатели имеют шесть, трехскоростные — девять и четырехскоростные — 12 выводов к переключателю полюсов.
Следует заметить, что существуют схемы двухскоростных двигателей, которые при одной обмотке позволяют получить скорости вращения, отношение которых не равно 1:2. Такие электродвигатели обеспечивают синхронные скорости вращения 750/3000, 1000/1500, 1000/3000 об/мин.
Путем использования специальных схем одной обмотки можно получить также три и четыре различных числа пар полюсов. Такие однообмоточные многоскоростные электродвигатели отличаются значительно меньшими габаритными размерами, чем двухобмоточные двигатели с теми же параметрами, что весьма важно для станкостроения.
Кроме того, у однообмоточных электродвигателей несколько выше энергетические показатели и меньше трудоемкость изготовления. Недостатком однообмоточных многоскоростных электродвигателей является наличие большего числа проводов, вводимых к переключателю.
Сложность переключателя определяется, однако, не столько числом выведенных наружу проводов, сколько числом одновременно осуществляемых переключений. В связи с этим были разработаны схемы, позволяющие при наличии одной обмотки получить три и четыре скорости при относительно простых переключателях.
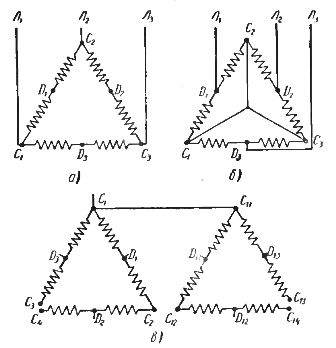
Рис. 2. Схемы переключения полюсов асинхронного двигателя.
Такие электродвигатели выпускаются станкостроительной промышленностью при синхронных скоростях 1000/1500/3000, 750/1500/3000, 150/1000/1500, 750/1000/1500/3000, 500/750/1000/1500 об/мин.
Вращающий момент асинхронного двигателя может быть выражен известной формулой

где Iг — ток в цепи ротора; Ф — магнитный поток двигателя; 2— угол сдвига фаз между векторами тока и э. д. с. ротора.

Рис. 3. Трехфазный многоскоростной электродвигатель с короткозамкнутым ротором.
Рассмотрим эту формулу применительно к вопросам регулирования скорости асинхронного двигателя.
Наибольшая продолжительно допустимая сила тока в роторе определяется допустимым нагревом и, следовательно, является примерно постоянной величиной. Если регулирование скорости ведется с постоянным магнитным потоком, то при всех скоростях двигателя наибольший длительно допустимый момент будет также величиной постоянной. Такое регулирование скорости называется регулированием с постоянным моментом.
Регулирование скорости изменением сопротивления в цепи ротора является регулированием с постоянным предельно допустимым моментом, так как магнитный поток машины при регулировании не изменяется.
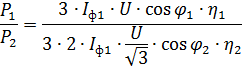
Предельно допустимая полезная мощность на валу электродвигателя при меньшей скорости вращения (и, следовательно, большем числе полюсов) определяется выражением

где Iф1 — фазовый ток, предельно допустимый по условиям нагрева; Uф1 — фазовое напряжение статора при большем числе полюсов.

Предельно допустимая полезная мощность на валу электродвигателя при большей скорости вращения (и меньшем числе полюсов) где Iф2 — фазовый ток, предельно допустимый по условиям нагрева при второй схеме включения статора; Uф2— фазовое напряжение в этом случае.
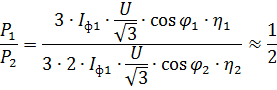
При переходе от соединения треугольником к соединению звездой фазовое напряжение уменьшается в 2 раза. Таким образом, при переключении со схемы а на схему б (рис. 2) получим отношение мощностей
Принимая приближенно

получим
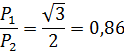
Иначе говоря, мощность на меньшей скорости составляет 0,86 мощности на большей скорости вращения ротора. Имея в виду относительно небольшое изменение наибольшей длительно допустимой мощности на обеих скоростях, такое регулирование условно именуют регулированием при постоянной мощности.
Если при последовательном соединении половин каждой фазы воспользоваться соединением звездой, а затем переключить на соединение параллельной звездой (рис. 2, б), то получим
Или
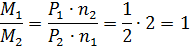
Навигация по записям