




Автоматизированный электропривод крановых механизмов с тиристорным управлением
 Современные системы
Современные системы
электроприводов крановых механизмов выполняются в основном с применением
асинхронных двигателей, скорость которых регулируется
релейно-контакторным способом путем введения сопротивлений в цепь
ротора. Такие электроприводы обладают малым диапазоном регулирования
скорости, а при пусках и торможениях создают большие рывки и ускорения,
что плохо влияет на работу конструкции крана, ведет к раскачиванию груза
и ограничивает применение таких систем на кранах повышенной высоты и
грузоподъемности …
Современные системы электроприводов крановых механизмов выполняются в основном с применением асинхронных двигателей, скорость которых регулируется релейно-контакторным способом путем введения сопротивлений в цепь ротора. Такие электроприводы обладают малым диапазоном регулирования скорости, а при пусках и торможениях создают большие рывки и ускорения, что плохо влияет на работу конструкции крана, ведет к раскачиванию груза и ограничивает применение таких систем на кранах повышенной высоты и грузоподъемности.
Развитие силовой полупроводниковой техники позволяет вносить принципиально новые решения в структуру автоматизированного электропривода крановых установок. В настоящее время на механизмах подъема и передвижения башенных и мостовых кранов применяется регулируемый электропривод с двигателями постоянного тока, питаемыми от мощных тиристорных преобразователей, — система ТП — Д.
Скорость двигателя в таких системах регулируется в диапазоне (20 30):I путем изменения напряжения на якоре. При этом в переходных процессах система обеспечивает получение ускорений и рывков в пределах заданных норм.
Хорошие регулировочные качества появляются и у асинхронного электропривода при включении тиристорного преобразователя в цепь статора асинхронного двигателя (АД). Изменение напряжения на статоре двигателя в замкнутой САУ позволяет ограничить пусковой момент, получить плавный разгон (торможение) привода и необходимый диапазон регулирования скорости.
Применение тиристорных преобразователей в автоматизированном электроприводе крановых механизмов находит все большее применение в отечественной и зарубежной практике. Для ознакомления с принципом действия и возможностями таких установок остановимся кратко на двух вариантах схем управления двигателями постоянного и переменного токов.
На рис. 1 изображена принципиальная схема тиристорного управления двигателем постоянного тока независимого возбуждения для механизма подъема мостового крана. Якорь двигателя питается от реверсивного тиристорного преобразователя, который состоит из силового трансформатора Тр, служащего для согласования напряжений преобразователя и нагрузки, двух групп тиристоров Т1— Т6 и Т7 — Т12, соединенных по трехфазной мостовой встречно-параллельной схеме, уравнительных реакторов 1УР и 2УР, являющихся одновременно сглаживающими реакторами, выполненными ненасыщающимися.
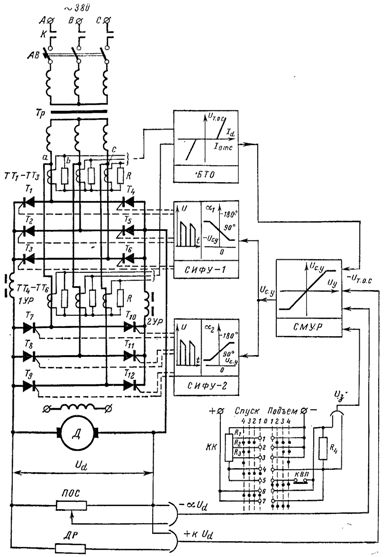
Рис. 1. Схема кранового электропривода по системе ТП—Д.
Группа тиристоров Т1 — Т6 работает выпрямителем при подъеме и инвертором — при спуске тяжелых грузов, так как направление тока в якорной цепи двигателя для этих режимов одинаково. Вторая группа тиристоров Т7 — Т12, обеспечивающая противоположное направление тока якоря, работает выпрямителем при силовом спуске и в переходных режимах пуска двигателя на тормозной спуск, инвертором — при торможении в процессе подъема грузов или крюка.
В отличие от механизмов передвижения кранов, в которых тиристорные группы должны быть одинаковыми, в механизмах подъема мощность тиристоров второй группы может быть взята меньшей, чем первой, так как ток двигателя при силовом спуске значительно меньше, чем при подъеме и спуске тяжелых грузов.
Регулирование выпрямленного напряжения тиристорного преобразователя (ТП) осуществляется с помощью полупроводниковой системы импульсно-фазового управления, состоящий из двух блоков СИФУ-1 и СИФУ-2 (рис. 1), каждый из которых подает на соответствующий тиристор по два отпирающих импульса, сдвинутых на 60°.
С целью упрощения системы управления и повышения надежности электропривода в данной схеме применяется согласованное управление реверсивным ТП. Для этого регулировочные характеристики и системы управления обеими группами должны быть жестко связаны. Если на тиристоры Т1 — Т6 подаются отпирающие импульсы, обеспечивающие выпрямительный режим работы этой группы, то на тиристоры Т7 — Т12 отпирающие импульсы подаются так, чтобы эта группа была подготовлена к работе инвертором.
Углы регулирования 1 и 2 при любых режимах работы ТП должны изменяться таким образом, чтобы среднее напряжение выпрямительной группы не превышало напряжение инверторной группы, т. е. Если это условие не соблюдается, то между двумя группами тиристоров будет протекать выпрямленный уравнительный ток, который дополнительно загружает вентили и трансформатор и может также привести к срабатыванию защиты.
Однако и при правильном согласовании углов управления 1 и 2 тиристорами выпрямительной и инверторной групп возможно протекание переменного уравнительного тока вследствие неравенства мгновенных значений напряжений UB и UI . Для ограничения этого уравнительного тока служат уравнительные реакторы 1УР и 2УР.
По одному из реакторов всегда проходит ток якоря двигателя, благодаря чему уменьшаются пульсации этого тока, а сам реактор частично насыщается. Второй реактор, по которому в данный момент протекает только уравнительный ток, остается ненасыщенным и ограничивает iyp.
Тиристорный электропривод крана имеет одноконтурную систему управления (СУ), выполненную с использованием быстродействующего реверсивного суммирующего магнитного усилителя СМУР, который питается от генератора прямоугольного напряжения частотой 1000 Гц. При наличии токовой отсечки такая СУ позволяет получить удовлетворительные статические характеристики и высокое качество переходных процессов.
Система управления электроприводом содержит отрицательные обратные связи по напряжению и току двигателя с отсечками, а также слабую положительную обратную свя
 10.12.2016
10.12.2016
 Без рубрики
Без рубрики
 Нет комментариев
Нет комментариев