 Тормозной режим работы двигателя в электроприводе применяется наравне с двигательным. Использование электродвигателя в качестве электрического тормоза широко применяется на практике для сокращения времени остановки и реверса, уменьшения скорости вращения, предотвращения чрезмерного увеличения скорости движения и в ряде других случаев. Работа электродвигателя в качестве электрического тормоза основана на принципе обратимости электрических машин, то есть электродвигатель при определенных условиях переходит в генераторный режим …
Тормозной режим работы двигателя в электроприводе применяется наравне с двигательным. Использование электродвигателя в качестве электрического тормоза широко применяется на практике для сокращения времени остановки и реверса, уменьшения скорости вращения, предотвращения чрезмерного увеличения скорости движения и в ряде других случаев. Работа электродвигателя в качестве электрического тормоза основана на принципе обратимости электрических машин, то есть электродвигатель при определенных условиях переходит в генераторный режим …
Тормозной режим работы двигателя в электроприводе применяется наравне с двигательным. Использование электродвигателя в качестве электрического тормоза широко применяется на практике для сокращения времени остановки и реверса, уменьшения скорости вращения, предотвращения чрезмерного увеличения скорости движения и в ряде других случаев.
Работа электродвигателя в качестве электрического тормоза основана на принципе обратимости электрических машин, то есть электродвигатель при определенных условиях переходит в генераторный режим.
Практически для торможения применяются три режима:
1) генераторный (рекуперативный) с отдачей энергии в сеть,
2) электродинамический,
3) противовключение.
При построении механических характеристик в системе прямоугольных координат важное значение имеет определение знаков момента и скорости вращения двигателя в двигательном и тормозных режимах. Для этого двигательный режим принимают условно за основной, считая скорость вращения и момент двигателя в этом режиме положительными. В связи с этим характеристики n = f (М) двигательного режима располагаются в первом квадранте (рис. 1). Расположение механических характеристик в тормозных режимах зависит от знаков момента и скорости вращения.
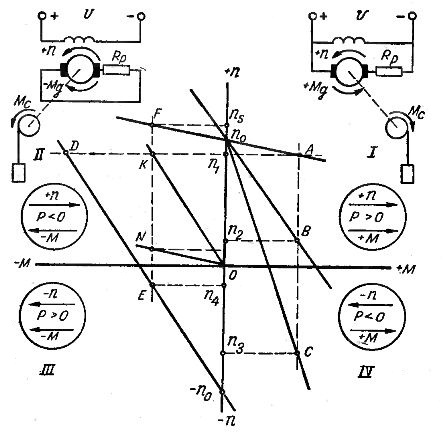
Рис. 1. Схемы включения и механические характеристики двигателя с параллельным возбуждением в двигательном и тормозных режимах.
Рассмотрим эти режимы и соответствующие им участки механических характеристик двигателя с параллельным возбуждением.
Противовключение.
Состояние электропривода определяется совместным действием момента двигателя Мд и статического момента нагрузки Мс. Например, установившаяся скорость вращения n1 при подъеме груза лебедкой соответствует работе двигателя на естественной характеристике (рис.1 точка А), когда Мд = Мс. Если в цепь якоря двигателя ввести добавочное сопротивление, то скорость вращения снизится вследствие перехода на реостатную характеристику (точка В, соответствующая скорости n2 и Мд = Мс).
Дальнейшее постепенное увеличение добавочного сопротивления в цепи якоря двигателя (например, до величины, отвечающей участку n0С характеристики) приведет вначале к прекращению подъема груза, а затем к изменению направления вращения, то есть груз будет опускаться (точка С). Такой режим называют противовключением.
В режиме противовключения момент Мд имеет положительный знак. Знак скорости вращения изменился и стал отрицательным. Следовательно, механические характеристики режима противовключения располагаются в четвертом квадранте, а сам режим является генераторным. Это вытекает из принятого условия определения знаков момента и скорости вращения.
Действительно, механическая мощность, пропорциональная произведению n и М, в двигательном режиме имеет положительный знак и направлена от двигателя к рабочей машине. В режиме противовключения вследствие отрицательного знака n и положительного знака М их произведение будет отрицательным, следовательно, механическая мощность передается в обратном направлении — от рабочей машины к двигателю (генераторный режим). На рис. 1 знаки n и М в двигательном и тормозных режимах показаны в кружках, стрелками.
Участки механической характеристики, соответствующие режиму противовключения, являются естественным продолжением характеристик двигательного режима из первого в четвертый квадрант.
Из рассмотренного примера перехода двигателя в режим противовключения видно, что э. д. с. двигателя, зависящая от скорости вращения, одновременно с последней при переходе через нулевое значение изменяет знак и действует согласно с напряжением сети: U = (—Е)+IяRя, откуда Iя = (U+Е)/R
Для ограничения тока в цепь якоря двигателя включают значительное по величине сопротивление, обычно равное двукратному пусковому. Особенность режима противовключения состоит в том, что к двигателю подводится механическая мощность со стороны вала и электрическая мощность из сети, и вся она расходуется на нагревание цепи якоря: Рм+Рэ = ЕI + UI = I2(Rи + Iдоб)
Режим противовключения может быть получен и путем переключения обмоток на обратное направление вращения, в то время, как якорь продолжает вращаться в прежнем направлении за счет запаса кинетической энергии (например, при остановке машины с реактивным статическим моментом — вентилятора).
В соответствии с принятым условием учета знаков n и М по двигательному режиму, при переключении двигателя на обратное вращение следует изменить положительные направления координатных осей, то есть двигательный режим теперь окажется в третьем квадранте, а противовключение — во втором.
Таким образом, если двигатель работал в двигательном режиме в точке А, то в момент переключения, когда скорость еще не успела измениться, он окажется на новой характеристике, во втором квадранте в точке D. Торможение будет происходить вниз по характеристике DE (-n0), и если двигатель не отключить при скорости т = 0, он будет работать на этой характеристике в точке Е, вращая машину (вентилятор) в обратном направлении со скоростью —n4.

Электродинамический режим торможения
Электродинамическое торможение получают путем отключения якоря двигателя от сети и включения его на отдельное внешнее сопротивление (рис. 1, второй квадрант). Очевидно, что этот режим мало отличается от работы генератора постоянного тока с независимым возбуждением. Работа на естественной характеристике (прямая N0) соответствует режиму короткого замыкания, из-за больших токов торможение в этом случае возможно только при малых скоростях.
В режиме электродинамического торможения якорь отключен от U сети, следовательно: U = 0; 0 = U/c = 0
Уравнение механической характеристики имеет вид: = (-RM)/c2 или = (-Rя + Rдоб/9,55се2)М
Механические характеристики электродинамического торможения проходят через начало координат, а это значит, что с уменьшением скорости тормозной момент двигателя уменьшается.
Наклон характеристик определяется так же, как и в двигательном режиме, величиной сопротивления в цепи якоря. Электродинамическое торможение экономичнее противовключения, так как энергия, потребляемая двигателем из сети, расходуется только на возбуждение.
Величина тока якоря, а следовательно, и тормозного момента зависит от скорости вращения и сопротивления цепи якоря: I = —Е/R = -с/R
Генераторный режим с отдачей энергии в сеть
Такой режим возможен только в случае, когда направление действия статического момента совпадает с моментом двигателя. Под действием двух моментов — момента двигателя и момента рабочей машины — скорость вращения привода и э. д. с. двигателя начнут возрастать, в результате будет уменьшаться ток и момент двигателя: I = (U — Е)/R= (U — с)/R
Дальнейшее увеличение скорости вначале приводит к режиму идеального холостого хода, когда U = Е, I = 0 и n = n0, а затем, когда э. д. с. двигателя станет больше приложенного напряжения, двигатель перейдет в генераторный режим, то есть начнет отдавать энергию в сеть.
Механические характеристики в этом режиме являются естественным продолжением характеристик двигательного режима и располагаются во втором квадранте. Направление скорости вращения не изменилось, и она осталась по-прежнему положительной, а момент имеет отрицательный знак. В уравнении механической характеристики генераторного режима с отдачей энергии в сеть изменится знак момента, следовательно, оно будет иметь вид: = о + (R/c2)M или = о + (R/9,55cе3)M
Навигация по записям