 Грузоподъемные
Грузоподъемные
электромагниты имеют большую индуктивность, поэтому для быстрого и
полного сброса груза, а также для ограничения перенапряжения до значения
не более 2 кВ применяются специальные, схемы и аппаратура управления.
Электромагниты получают, напряжение от двигатель-генераторной или
выпрямительной установки. Принципиальные схемы управления при питании
электромагнитов от сети постоянного тока приведена на рисунке. Управление электромагнитом по указанной схеме производится …
Грузоподъемные электромагниты имеют большую индуктивность, поэтому для быстрого и полного сброса груза, а также для ограничения перенапряжения до значения не более 2 кВ применяются специальные, схемы и аппаратура управления. Электромагниты получают, напряжение от двигатель-генераторной или выпрямительной установки. Принципиальные схемы управления при питании электромагнитов от сети постоянного тока приведена на рис. 1, а и б.
Управление грузоподъемным электромагнитом по указанной схеме производится следующим образом. При включении командоконтроллера К подается напряжение на контактор намагничивания В, замыкающие контакты которого подключают электромагнит к сети. При этом по катушке М электромагнита протекает номинальный ток, а параллельно включенное разрядное сопротивление (Р1— Р4, Р4—РЗ и РЗ—Р2) обтекается током меньшего значения. Катушка контактора Н, включенная между точками 6 и 7, не обтекается током вследствие наличия последовательно включенного размыкающего вспомогательного контакта В, разомкнутого при включенном контакторе В.
При отключении командоконтроллера К. размыкаются замыкающие контакты контактора В, электромагнит кратковременно отключается и автоматически включается на обратную полярность, а после отпадания груза электромагнит окончательно отключается от источника питания. Такое включение электромагнита обеспечивает размагничивание груза, что способствует быстрому его отпаданию.
Автоматическое действие при отключении электромагнита обеспечивается главным образом работой контактора размагничивания Н. Напряжение на зажимах катушки контактора Н определяется падением напряжения на участках сопротивлений 6—Р4 и Р4—7. При отключении электромагнита его ток не исчезает мгновенно, а замыкается через цепочку разрядных сопротивлений. Сопротивления участков 6—Р4 и Р4—7 подобраны таким образом, что после отключения командоконтроллера К и замыкания размыкающего контакта В включается контактор Н.
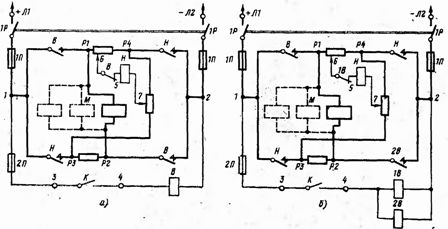
Рис. 1. Принципиальные схемы управления магнитными контроллерами ПМС 50 (а) и ПМС 150 (б) для подъемных электромагнитов: В или 1В, 2В—двухполюсный контактор намагничивания или два однополюсных; Н — двухполюсной контактор размагничивания; 1P — рубильник; 1П, 2П — предохранители силовой цепи и цепи управления; К — командоконтроллер; М — электромагнит; Р1—Р4, Р4—РЗ и РЗ—Р2 — разрядные сопротивления.
После включения контактора Н замыкаются его силовые контакты и электромагнит подключается к сети. При этом направление тока в катушке электромагнита и в сопротивлении 6—Р4, включенном последовательно с катушкой, с течением времени изменяется на обратное. Изменение направления тока на участке сопротивления 6—Р4 происходит с предварительным снижением предыдущего противоположно направленного тока до нуля. При нуле тока на участке 6—Р4 контактор Н удерживается во включенном состоянии, так как для этого достаточно падения напряжения на участке Р4—7 (на участке 6—Р4 падение напряжения при этом равно нулю).
При изменении направления тока на участке 6—Р4 контактор Н отключается, так как его катушка оказывается включенной на разность падений напряжении на участках 6—Р4 и Р4—7. Отключение контактора Н происходит при достижении током размагничивания величины, равной 10—20% рабочего тока холодной катушки электромагнита, т. е. практически после размагничивания и отпадания груза.
Отключаясь, контактор Н отключает от сети катушку электромагнита, которая остается замкнутой на разрядное сопротивление. Это облегчает условия разрыва дуги контактором и снижает перенапряжение, увеличивая срок службы изоляции катушки. Размыкающий вспомогательный контакт контактора В (в цепи катушки контактора Н) исключает одновременную работу обоих контакторов.
Схема позволяет регулировать время размагничивания, что можно осуществить передвижением хомутов сопротивлений, т. е, изменением значений сопротивлений участков 6—Р4 и Р4—7. Вместе с тем это время автоматически регулируется в зависимости от вида поднимаемого груза. При большей массе груза магнитная проводимость его больше, что приводит к увеличению постоянной времени электромагнита и тем самым к увеличению времени размагничивания. При малой массе груза время размагничивания уменьшается.
По описанной схеме изготавливаются магнитные контроллеры типов ПМС 50, ПМС 150, ПМС50Т и ПМС 150Т.
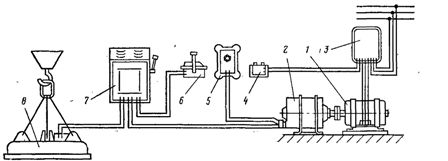
Рис. 2. Схема питания грузоподъемного электромагнита на кране при наличии сети переменного тока: 1 — асинхронный электродвигатель; 2 —генератор достоянного тока; 3 — магнитный пускатель; 4 — кнопка управления; 5—регулятор возбуждения; 6—командоконтроллер; 7 — магнитный контроллер; 8 — грузоподъемный электромагнит.
Большинство кранов с грузоподъемными электромагнитами питаются от сети переменного тока, поэтому для электромагнитов постоянного тока необходимо использовать двигатель-генераторную или выпрямительную установку. На рис. 2 показана схема питания грузоподъемного электромагнита от двигатель-генераторной установки. Защита генератора от токов к.з. в кабеле, питающем электромагнит, осуществляется реле напряжения типа РЭВ 84.
Замена вращающихся преобразователей статическими позволяет снизить капитальные затраты, массу электрооборудования и эксплуатационные расходы. Магнитный контроллер типа, ПСМ 80 в комплекте с сельсинным командоконтроллером КП 1818 дает возможность регулировать грузоподъемность. Это имеет большое значение при работах, связанных с отделкой, сортировкой, маркировкой и транспортированием листового железа на металлургических заводах, а также на различных складах и базах.
На рис. 3 показана схема магнитного контроллера ПСМ 80 со статическим управляемым преобразователем. Преобразователь выполнен по бестрансформаторной трехфазной двухполупериодной схеме с одним тиристором и разрядным диодом. Регулирование тока осуществляется изменением выходного напряжения преобразователя за счет изменения угла открывания тиристора. Угол открывания тиристора зависит от задающего сигнала, который плавно регулируется в широких пределах сельсинным командоконтроллером.
В блоке питания I используется трехобмоточный трансформатор. Обмотка 36 В служит для питания релейных элементов, с обмотки 115 В снимается напряжение возбуждения сельсина командоконтроллера. В блок питания входит однофазный выпрямительный мост Д7—Д10, на выходе которого установлены стабилитроны Ст1—Ст3 и балластный резистор R2.
Стабилизированное напряжение питания релейного элемента 16,4 В снимается со стабилитронов Ст2 и Ст3. При этом через резистор R3 и базу транзистора Т1 протекает в прямом направлении ток, открывающий транзистор. Со стабилитрона Ст1 подается отрицательное смещение (—5,6 В) на базу транзистора Т2 для запирания его при открытом транзисторе Т1.
Блок задания II состоит из сельсина, входящего в сельсинный командоконтроллер, и однофазного выпрямительного моста Д11—Д14. На вход моста подается линейное напряжение ротора сельсина, изменяющееся при его повороте относительно статора. Поворот ротора осуществляется рукояткой СКК. На выходе моста получается изменяющееся выпрямленное напряжение, пропорционально которому изменяется и выходной ток, протекающий при открытом транзисторе Т1 через его базу и резистор R6. Релейный элемент собран на двух транзисторах типа п-р-п.
Для обеспечения фазового режима регулирования в схеме предусмотрен источник пилообразного напряжения, представляющий собой цепочку RC, которая шунтируется тиристором Т. Пока тиристор закрыт, происходит заряд конденсаторов C4 С5. Когда тиристор Т открывается, происходит быстрый разряд конденсаторов. Пилообразный ток протекает через резистор R13 и базу транзистора Т1.
Сельсинный командоконтроллер имеет одно фиксированное положение (нулевое) и обеспечивает заторможенное состояние в любом промежуточном положении рукоятки управления. При этом каждому положению ротора сельсина соответствует определенное значение тока электромагнита. На позициях регулирования схема с достаточной точностью поддерживает среднее значение тока электромагнита при нагреве его катушки. Допустимые отклонения тока для холодной и горячей катушки не превышают 10%, а максимальное значение тока для нагретой катушки не превышает каталожного значения тока более чем на 5 . При колебаниях напряжения питающей сети в пределах (0,85— 1,05) UH изменение тока электромагнита не выходит за указанные пределы.
Силовая схема коммутации на стороне постоянного тока содержит:
• двухполюсные контакторы для прямого KB и обратного КН включений электромагнита;
• два реле времени РВ и РП для управления процессом размагничивания электромагнита при отключении,
• разрядные резисторы R19—R22 для ограничения перенапряжения, возникающего при отключении электромагнита;
• диод Д4 для уменьшения мощности разрядных резисторов.
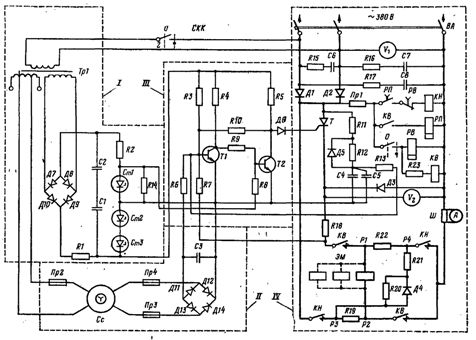
Рис. 3. Схема регулирования грузоподъемности электромагнита: I-блок питания: II — блок задания; III — релейный элемент; VI — силовая схема; R1—R25 — резисторы- C1—C8 — конденсаторы, Ш – шунт; ВА — включатель автоматический; Д1-Д16 — диоды; КВ и KН — контакторы прямого и обратного вьючений электромагнита (намагничивания и размагничивания); РВ и РП — реле времени для управления процессом размагничивания, Пр1 – Пр4 — предохранители; Сс — сельсин контроллера; Cт1-Ст3 — стабилитроны; Т — тиристор: Т1, Т2 – транзисторы, ТР1 – трансформатор; ЭМ — электромагнит грузоподъемный; СКК— сельсинный командоконтроллер .
При обрыве кабеля, питающего электромагнит, необходимо отключить рубильник или автоматический выключатель магнитного контроллера. Находиться под краном с работающим электромагнитом категорически запрещено. Осмотр и замена аппаратов должны производиться при отключенном вводном рубильнике крана.
Все электрические аппараты должны быть надежно заземлены. Особое внимание следует обращать на заземление электромагнита. Болт заземления в коробке электромагнита соединяют с заземляющим болтом шкафа магнитного контроллера. Соединение осуществляется одной из жил трех жильного питающего кабеля. В остальном при эксплуатации электрооборудования следует руководствоваться общими правилами безопасности обслуживания электроустановок.